Преобразование из трехфазного (abc) сигнала во вращающийся опорный кадр dq0 или обратный
Simscape / Электрический / Специализированные Энергосистемы / Контроль


Блок abc-dq0 использует преобразование Park для преобразования трехфазного (abc) сигнала в вращающийся опорный кадр dq0. Угловое положение вращающейся рамы определяется входным весом в рад.
Блок от dq0 до abc использует обратное преобразование Park для преобразования вращающегося опорного кадра dq0 в трехфазный (abc) сигнал. Угловое положение вращающейся рамы определяется входным весом в рад.
Когда выравнивание вращающегося кадра при wt = 0 находится на 90 градусов позади оси фазы А, сигнал положительной последовательности с Mag = 1 и Phase = 0 градусов дает следующие значения dq: d = 1, q = 0.
V0=13 (Va+Vb+Vc)
+ 2δ/3) + Vqcos (startt + 2λ/3) + V0
Блок поддерживает два соглашения, используемых для преобразования парка:
Когда вращающаяся рамка выровнена с осью фазы A при t = 0, то есть при t = 0, ось d выравнивается с осью a. Этот тип преобразования Парка также известен как преобразование Парка на основе косинуса.
Когда вращающаяся рама выровнена на 90 градусов позади оси А фазы, то есть при t = 0, ось q выровнена с осью А. Этот тип преобразования Парка также известен как преобразование Парка на основе синуса. Используйте это преобразование в моделях Simscape™ Electrical™ Specialized Power Systems с трехфазовыми синхронными и асинхронными машинами.
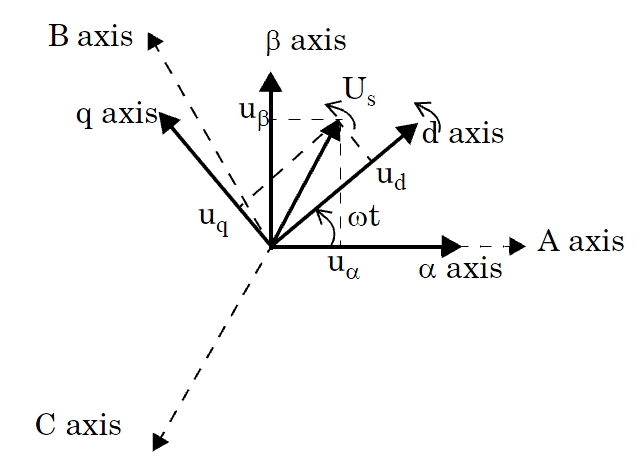
Выведите компоненты dq0 из сигналов abc, выполняя преобразование abc-αβ0 Кларка в фиксированной опорной системе отсчета. Затем выполните преобразование αβ0 в dq0 во вращающемся опорном кадре, то есть, выполняя поворот − (α.t) на пространственном векторе Us = uα + j· uβ.
Преобразование abc-в-dq0 зависит от выравнивания кадров dq при t = 0. Положение вращающейся рамы задается, в том случае, когда λ представляет скорость вращения рамы dq.
Когда вращающаяся рама выровнена с осью фазы А, получаются следующие соотношения:
121212 [cos (startt) cos (
Обратное преобразование задаётся:
sin (startt + 2ā3) 1] [uduqu0]
Когда вращающаяся рама выровнена на 90 градусов позади оси фазы А, получаются следующие соотношения:
cos (startt + 2ų 3) 121212] [uaubuc]
Обратное преобразование задаётся:
(startt + 2ā3) 1] [uduqu0]
power_Transformations В примере показаны различные способы использования блоков для выполнения преобразований Кларка и Парка.
