Определить частоту и фундаментальную составляющую фазового угла сигнала
Simscape / Электрический / Специализированные Энергосистемы / Контроль
Блок ФАПЧ моделирует систему управления замкнутым контуром фазовой синхронизации (ФАПЧ), которая отслеживает частоту и фазу синусоидального сигнала с использованием генератора внутренней частоты. Система управления регулирует частоту внутреннего генератора, чтобы поддерживать разность фаз равной 0.
На рисунке показана внутренняя схема ФАПЧ.
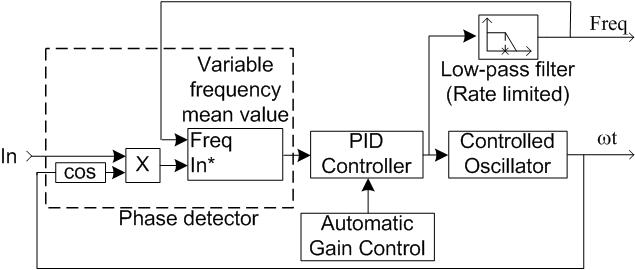
Входной сигнал смешивается с сигналом внутреннего генератора. Составляющая постоянного тока смешанного сигнала (пропорциональная разности фаз между этими двумя сигналами) извлекается с переменным средним значением частоты. Контроллер пропорциональной интегральной производной (PID) с опциональным автоматическим регулированием усиления (AGC) поддерживает разность фаз равной 0, воздействуя на управляемый генератор. Выходной сигнал PID, соответствующий угловой скорости, фильтруется и преобразуется в частоту в герцах, которая используется средним значением.
Укажите минимальную ожидаемую частоту входного сигнала. Этот параметр задает размер буфера блока средней (переменной частоты), используемого внутри блока для вычисления среднего значения. По умолчанию: 45.
Укажите начальную фазу и частоту входного сигнала. По умолчанию: [0, 60].
Укажите пропорциональный, интегральный и производный коэффициенты усиления внутреннего PID-контроллера. Используйте коэффициенты усиления для настройки времени отклика ФАПЧ, переполнения и стационарных характеристик ошибок. По умолчанию: [180, 3200, 1].
Укажите постоянную времени для фильтра первого порядка блока производной PID. По умолчанию: 1e-4.
Укажите максимальный положительный и отрицательный наклон частоты сигнала. По умолчанию: 12.
Укажите частоту отключения фильтра нижних частот второго порядка. По умолчанию: 25.
Укажите время выборки блока в секундах. Установите значение 0 для реализации непрерывного блока. По умолчанию: 0.
Если этот флажок установлен, блок ФАПЧ оптимизирует свои рабочие характеристики путем масштабирования сигнала ПИД-регулятора в соответствии с величиной входного сигнала. Выберите эту опцию, если входной сигнал не нормализован. Выбрано значение по умолчанию.
InНормализованный входной сигнал в pu.
FreqИзмеренная частота, в герцах.
wtУгол (rad), изменяющийся между 0 и 2 * pi, синхронизированный на пересечении нуля (подъеме) основы входного сигнала.
| Время выборки | Задается в параметре Sample Time. Непрерывное, когда время выборки = 0. |
| Скалярное расширение | Нет |
| Определенный размерность | Нет |
| Обнаружение пересечения нулей | Да |
power_PLL Пример показывает использование блоков ФАПЧ (3ph) и ФАПЧ.
Блок ФАПЧ питается синусоидальным сигналом 60 Гц, увеличивающимся до 61 Гц с 0,5 с до 1,5 с. Обратите внимание, что частота достигает новой частоты за короткое время отклика.
Блок ФАПЧ (3ph) подается трехфазными синусоидальными сигналами, увеличивающимися от 60 Гц до 61 Гц между 0,5 и 1,5 с. Частота ФАПЧ достигает новой частоты быстрее, чем ФАПЧ, благодаря дополнительной информации о фазе.
Время образца модели параметризуется переменной Ts (со значением по умолчанию 0). Для дискретизации блока PLL в командной строке MATLAB ® введите
Ts = 50e-6
