Библиотека Electric Drives предназначена для инженеров из многих дисциплин, которые хотят легко и точно использовать электрические приводы при моделировании своих систем. Интерфейс представляет параметры выбранного диска в топологии системного вида, тем самым упрощая настройки, которые пользователи могут захотеть довести до значений по умолчанию. Затем они могут бесшовно использовать любые другие панели инструментов или блоки для анализа временного или частотного поведения электропривода, взаимодействующего с его системой. Библиотека наиболее полезна, когда мощный привод необходимо тщательно маневрировать, не игнорируя рабочие пределы нагрузки с одной стороны и источника питания с другой стороны. Хорошим примером является система электропривода гибридного автомобиля, которая может переключаться в миллисекундах с привода колес на подзарядку батарей при включенном тормозах.
Инженеры и ученые могут легко работать с библиотекой. Библиотека имеет семь типичных приводов постоянного тока (DC), используемых в промышленности и транспортных системах, восемь приводов переменного тока (AC), обеспечивающих более эффективные и универсальные двигатели от тяговых до позиционирующих устройств, а также модели вала и редуктора скорости, пригодные для подключения к двигателю модели нагрузки из блоков Simulink ®. Дополнительным значением библиотеки являются параметры, которые гарантируют действительность двигателя, преобразователей мощности и системы управления. При проектировании библиотеки особое внимание уделялось моделям двигателей путём сравнения поведения моделей с опубликованными данными основных производителей. С библиотекой поставляются многочисленные примеры или примеры типичных накопителей. Следует надеяться, что типичные пользовательские системы аналогичны этим анализируемым системам, тем самым экономя время при построении практической системы и поставляя известную точку отсчета в анализе .
Чтобы получить доступ к библиотеке электроприводов, откройте главную библиотеку Simscape™ Electrical™Specialized Power Systems. В командной строке MATLAB ® введите:
simscapepowersystems_ST
Электропривод - система, выполняющая преобразование электрической энергии в механическую на регулируемых скоростях. Это причина, по которой электропривод также называется регулируемым скоростным приводом (ASD). Кроме того, электропривод всегда содержит регулирование тока (или крутящего момента) для обеспечения безопасного регулирования тока двигателя. Поэтому крутящий момент/частота вращения электропривода может соответствовать в установившемся состоянии характеристикам крутящего момента/частоты вращения любой механической нагрузки. Это соответствие двигателя механической нагрузке означает лучшую энергоэффективность и приводит к снижению затрат энергии. Кроме того, во время переходного периода ускорения и замедления электропривод обеспечивает быструю динамику и допускает, например, мягкие пуски и остановки.
Растущее число применений требует, чтобы крутящий момент и частота вращения варьировались в соответствии с механической нагрузкой. Электрические транспортные средства, лифты, компьютерные дисковые накопители, станки и роботы являются примерами высокопроизводительных приложений, в которых желаемый профиль движения в зависимости от времени должен отслеживаться очень точно. Насосы, вентиляторы, конвейеры и системы ОВКВ являются примерами применения с умеренной производительностью, в которых работа с переменной скоростью означает экономию энергии.
Электропривод состоит из следующих основных компонентов:
Электродвигатель
Силовой электронный преобразователь
Контроллер привода
На этой схеме показана базовая топология электропривода.
Базовая топология электропривода
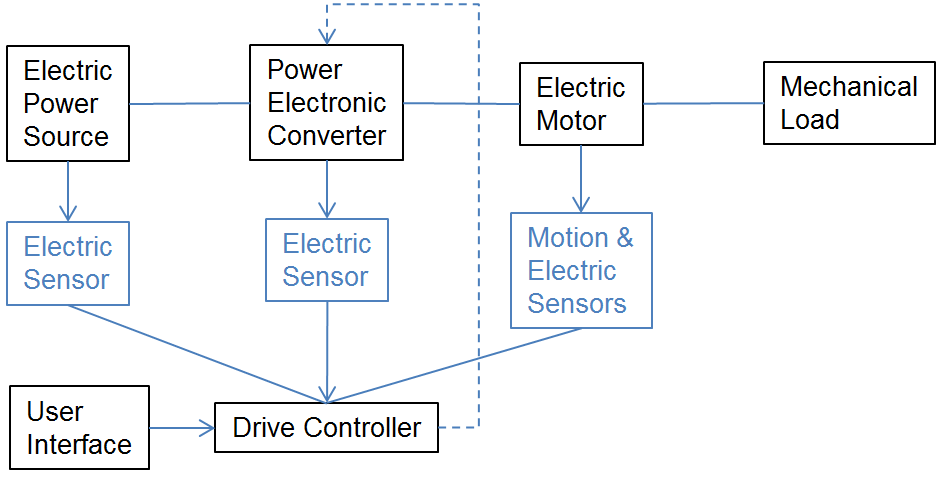
Электродвигателем, используемым в электроприводе, является либо электродвигатель постоянного тока (DC), либо электродвигатель переменного тока (AC). Тип используемого двигателя определяет классификацию электропривода на электроприводы постоянного тока и электроприводы переменного тока.
Силовой электронный преобразователь вырабатывает переменное напряжение переменного тока и частоту от источника электроэнергии. Существует множество типов преобразователей в зависимости от типа электропривода. Приводы двигателей постоянного тока основаны на фазоуправляемых выпрямителях (преобразователи переменного тока) или на рубильниках (преобразователи постоянного тока), в то время как приводы двигателей переменного тока используют инверторы (преобразователи постоянного тока) или циклопреобразователи (преобразователи переменного тока). Базовой составляющей всех силовых электронных преобразователей является электронный переключатель, который является либо полуконтролируемым (управляемое включенное состояние), как в случае тиристора, либо полностью управляемым (управляемое включенное состояние и выключенное состояние), как в случаях IGBT (биполярный транзистор с изолированным затвором) и блоков GTO (выключение затвора). Управляемым признаком электронного переключателя является то, что позволяет преобразователю создавать переменное напряжение переменного тока и частоту.
Назначение контроллера привода состоит в преобразовании требуемого профиля крутящего момента/скорости привода в запускающие импульсы для электронного преобразователя мощности, принимая во внимание различные переменные возбуждения (токи, скорость и т.д.), подаваемые датчиками. Для выполнения этого преобразования контроллер сначала основан на регуляторе тока (или крутящего момента). Регулятор тока является обязательным, поскольку он защищает двигатель, точно управляя токами двигателя. Уставка (SP) этого регулятора может подаваться снаружи, если привод находится в режиме регулирования крутящего момента, или внутри регулятора скорости, если привод находится в режиме регулирования скорости. В библиотеке Electric Drives регулятор скорости находится последовательно с регулятором тока и основан на PI-контроллере, который имеет три важные функции:
Скорость изменения SP ограничена так, что требуемая скорость постепенно приближается к SP, чтобы избежать резких изменений шага.
Выход регулятора скорости, который является SP для регулятора тока, ограничен максимальными и минимальными потолками.
Интегральный термин также ограничен для того, чтобы избежать наматывания. На следующем рисунке показана блок-схема контроллера скорости на основе контроллера PI.
Регулятор скорости на основе контроллера PI
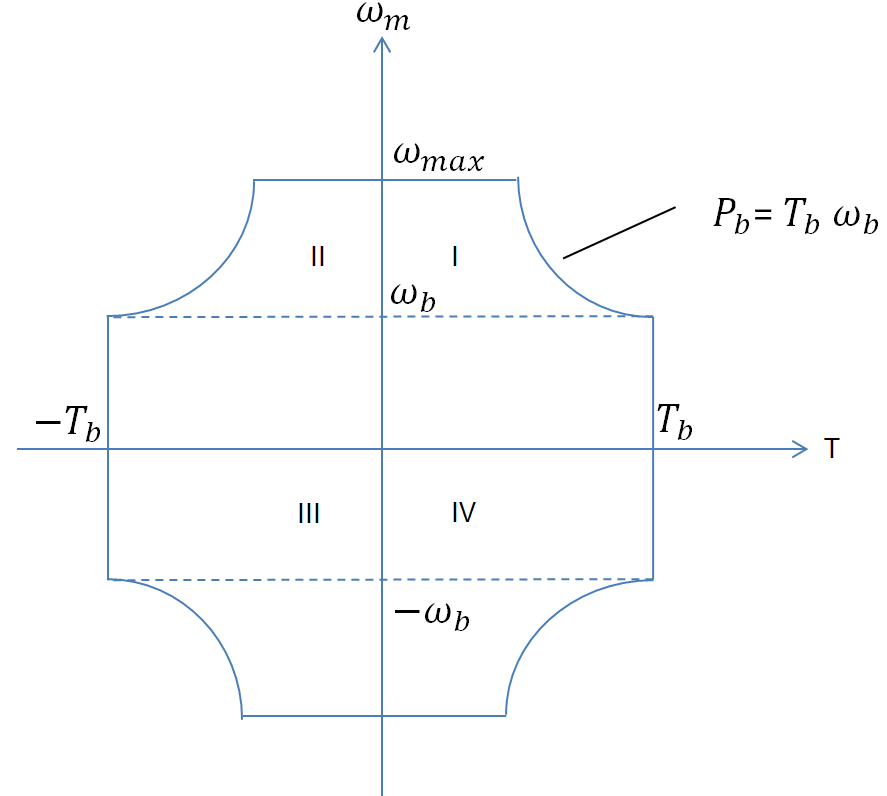
Для каждого применения электропривода механическая нагрузка, подлежащая приведению в действие, имеет определенный набор требований. Возможности крутящего момента/скорости электропривода могут быть представлены в виде графика зависимости скорости от крутящего момента, состоящего из четырех квадрантов. В первом квадранте электрический крутящий момент и знаки скорости являются положительными, что указывает на движение вперед, поскольку электрический крутящий момент находится в направлении движения. Во втором квадранте знак электрического крутящего момента отрицательный, а знак скорости положительный, что указывает на торможение вперед, поскольку электрический крутящий момент противоположен направлению движения. В третьем квадранте электрические знаки крутящего момента и скорости являются отрицательными, что указывает на обратное моторирование. В четвертом квадранте знак электрического крутящего момента положительный, а скорость отрицательная, что указывает на обратное торможение. Торможение приводом осуществляется либо тормозным рубильником (динамическое торможение), либо двунаправленным потоком мощности (рекуперативное торможение).
Эта диаграмма иллюстрирует четырехквадрантную рабочую область электропривода. Каждый квадрант имеет область постоянного крутящего момента от 0 до +/- номинальной скорости, и область, в которой крутящий момент уменьшается обратно со скоростью от startb до максимальной частоты. Эта вторая область является областью постоянной мощности и получается путем уменьшения магнитного потока двигателя.
Четырехквадрантная работа электропривода
Библиотека Electric Drives обеспечивает два уровня моделирования - детальное моделирование или моделирование среднего значения. При детальном моделировании используется блок Universal Bridge для представления детального поведения приводов, управляемых выпрямителями и инверторами. Этот уровень моделирования требует небольших временных шагов моделирования для достижения правильного представления компонентов высокочастотного электрического сигнала приводов.
При моделировании среднего значения используются модели среднего значения преобразователей мощности. При моделировании в режиме среднего значения электрические входные и выходные токи и напряжения силовых преобразователей, приводящих в действие электродвигатели, представляют собой средние значения реальных токов и напряжений. При этом высокочастотные компоненты не представлены, и моделирование может использовать гораздо большие временные шаги. Каждая модель среднего значения преобразователя мощности описана в документации для каждого типа модели постоянного или переменного тока. Временной шаг, используемый в дисководе на уровне среднего значения, обычно может быть увеличен до наименьшего времени выборки контроллера, используемого в модели. Например, если привод использует временной шаг 20 мкс для текущего цикла и временной шаг 100 мкс для цикла скорости, то временной шаг моделирования в режиме среднего значения может быть увеличен до 20 мкс. Рекомендации по шагам времени моделирования приведены в документации для каждой модели.
