Для интеграции пользовательского функционального блока, ExternalDefinedBlock, эта процедура использует пример plcdemo_external_symbols.
В модели Simulink ® добавьте функциональный блок MATLAB.
Дважды щелкните по блоку MATLAB Function.
В редакторе MATLAB ® минимально определите входы, выходы и заглушки. Например:
function Y = fcn(U,V) % Stub behavior for simulation. This block % is replaced during code generation Y = U + V;
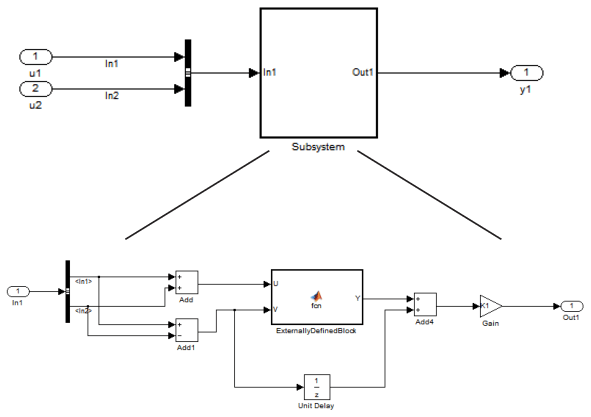
Измените имя функционального блока MATLAB на ExterningDefinedBlock.
Создайте подсистему из этого функционального блока MATLAB.
Заполните модель так, чтобы она выглядела plcdemo_external_symbols.
Откройте диалоговое окно Параметры конфигурации (Configuration Parameters) для модели.
Добавить ExternallyDefinedBlock в раздел «Создание кода ПЛК» > «Идентификаторы» > «Внешние идентификаторы».
plcdemo_external_symbols модель также подавляет K1 и InBus. Добавьте эти имена символов в поле «Внешние идентификаторы», разделенные пробелами или запятыми. Другие настройки см. в разделе plcdemo_external_symbols модель.
Сохраните и закройте новую модель. Например, сохраните его как plcdemo_external_symbols_mine.
Создайте код для модели.
В созданном коде найдите экземпляры ExternallyDefinedBlock.
Ссылка на ExternallyDefinedBlock является:

Упущение ExternallyDefinedBlock является:

