Сигналы РЛС обратного рассеяния от велосипедиста
backscatterBicyclist объект имитирует радиолокационные сигналы обратного рассеяния, отраженные от движущегося велосипедиста. Велосипедист состоит как из велосипеда, так и из его гонщика. Объект моделирует движение велосипеда и вычисляет сумму всех отраженных сигналов от множества дискретных рассеивателей на велосипеде. Модель игнорирует внутренние окклюзии внутри велосипедиста. Отраженные сигналы основаны на модели с множеством рассеивателей, разработанной из радиолокационной системы с частотой 77 ГГц.
Рассеиватели расположены на пяти основных компонентах велосипедистов:
Рама велосипеда и велогонщик
Педали велосипедов
Верхние и нижние ноги всадника
Переднее колесо
Заднее колесо
За исключением колёс, на велосипедисте 114 рассеивателей. Колеса содержат рассеиватели на ободе и спицы. Количество рассеивателей на колесах зависит от количества спиц на колесо. Количество оконечных устройств задается с помощью NumWheelSpokes собственность.
Вы можете получить текущее положение и скорость велосипедиста, позвонив move объектная функция. Вызов этой функции также обновляет положение и скорость для следующей эпохи времени. Для получения отраженного сигнала вызовите reflect объектная функция. Вы можете построить график мгновенного положения велосипедиста с помощью plot объектная функция.
bicyclist = backscatterBicyclist
bicyclist = backscatterBicyclist(Name,Value,...)
bicyclist = backscatterBicyclistbackscatterBicyclist объект, bicyclist, имеющие значения свойств по умолчанию.
bicyclist = backscatterBicyclist(Name,Value,...)backscatterBicyclist объект, bicyclist, с каждым указанным свойством Name установить в указанное значение Value. Можно указать дополнительные аргументы пары имя-значение в любом порядке как (Name1,Value1,...,NameN,ValueN). Все неопределенные свойства принимают значения по умолчанию. Например,
bicyclist = backscatterBicyclist( ...
'NumWheelSpokes',18,'Speed',10.0, ...
'InitialPosition',[0;0;0],'InitialHeading',90, ...
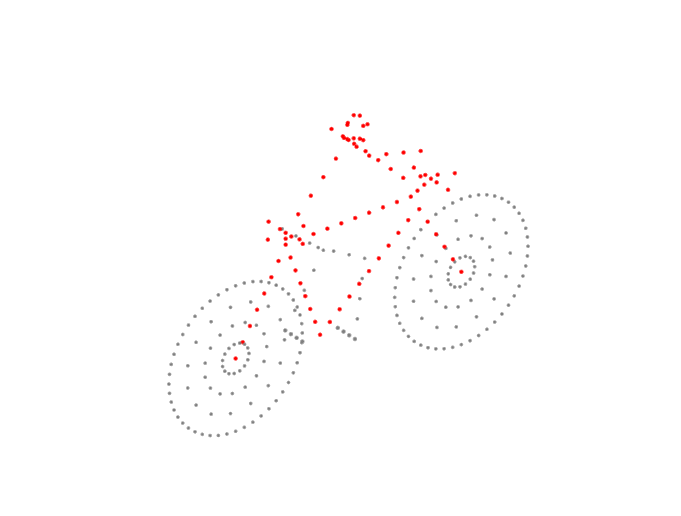
'GearTransmissionRatio',5.5);На этом рисунке изображен велосипедист, начинающий поворачивать налево.
Вычислите сигнал РЛС обратного рассеяния от велосипедиста, движущегося по оси Х на расстоянии 5 м/с от РЛС. Предположим, что радар расположен в начале координат. Радар передает сигнал LFM на частоте 24 ГГц с шириной полосы 300 МГц. Сигнал отражается в момент, когда велосипедист начинает движение, а затем на секунду позже.
Инициализация объектов Bicyclist, Waveform и канала распространения
Инициализируйте backscatterBicyclist, phased.LinearFMWaveform, и phased.FreeSpace объекты. Предположим, частота дискретизации 300 МГц. Исходное положение велосипедиста лежит на оси x в 30 метрах от радара.
bw = 300e6; fs = bw; fc = 24e9; radarpos = [0;0;0]; bpos = [30;0;0]; bicyclist = backscatterBicyclist( ... 'OperatingFrequency',fc,'NumWheelSpokes',15, ... 'InitialPosition',bpos,'Speed',5.0, ... 'InitialHeading',0.0); lfmwav = phased.LinearFMWaveform( ... 'SampleRate',fs, ... 'SweepBandwidth',bw); sig = lfmwav(); chan = phased.FreeSpace( ... 'OperatingFrequency',fc, ... 'SampleRate',fs, ... 'TwoWayPropagation',true);
График начальной позиции бициклиста
Использование move функция объекта, получение исходных положений рассеивателя, скоростей и ориентации велосипедиста. Постройте график исходного положения велосипедиста. dt аргумент move функция объекта определяет, что следующий вызов move возвращает бициклическое состояние движения dt секунды спустя.
dt = 1.0; [bpos,bvel,bax] = move(bicyclist,dt,0); plot(bicyclist)

Получение первого отраженного сигнала
Распространить сигнал на все рассеиватели и получить суммарный отраженный обратный сигнал.
N = getNumScatterers(bicyclist); sigtrns = chan(repmat(sig,1,N),radarpos,bpos,[0;0;0],bvel); [rngs,ang] = rangeangle(radarpos,bpos,bax); y0 = reflect(bicyclist,sigtrns,ang);
Распечатать положение бициклиста после обновления положения
После того, как велосипедист переместится, получите положения и скорости рассеивателя, а затем перемещайте велосипед по его траектории еще на секунду.
[bpos,bvel,bax] = move(bicyclist,dt,0); plot(bicyclist)

Получение второго отраженного сигнала
Распространить сигнал на все рассеиватели в их новых положениях и получить суммарный отраженный обратный сигнал.
sigtrns = chan(repmat(sig,1,N),radarpos,bpos,[0;0;0],bvel); [~,ang] = rangeangle(radarpos,bpos,bax); y1 = reflect(bicyclist,sigtrns,ang);
Сопоставить отраженные сигналы фильтра
Сопоставьте отраженные сигналы и постройте их график.
mfsig = getMatchedFilter(lfmwav); nsamp = length(mfsig); mf = phased.MatchedFilter('Coefficients',mfsig); ymf = mf([y0 y1]); fdelay = (nsamp-1)/fs; t = (0:size(ymf,1)-1)/fs - fdelay; c = physconst('LightSpeed'); plot(c*t/2,mag2db(abs(ymf))) ylim([-200 -50]) xlabel('Range (m)') ylabel('Magnitude (dB)') ax = axis; axis([0,100,ax(3),ax(4)]) grid legend('First pulse','Second pulse')

Вычислите разность в диапазоне между максимумами двух импульсов.
[maxy,idx] = max(abs(ymf)); dpeaks = t(1,idx(2)) - t(1,idx(1)); drng = c*dpeaks/2
drng = 4.9965
Разность дальности составляет 5 м, как и ожидалось, учитывая скорость велосипедиста.
Отображение спектрограммы, показывающей микродоплеровский эффект на радиолокационные сигналы, отраженные от рассеивателей на движущейся бициклической цели. Стационарная РЛС передает 1000 импульсов радиолокационной волны FMCW с шириной полосы 250 МГц и длительностью 1 мкс. Радар работает на частоте 24 ГГц. Велосипед стартует в 5 м от радара и отодвигается со скоростью 4 м/с.
Настройте форму сигнала, канал, передатчик, приемник и системные объекты платформы.
bw = 250e6; fs = 2*bw; fc = 24e9; c = physconst('Lightspeed'); tm = 1e-6; wav = phased.FMCWWaveform('SampleRate',fs,'SweepTime',tm, ... 'SweepBandwidth',bw); chan = phased.FreeSpace('PropagationSpeed',c,'OperatingFrequency',fc, ... 'TwoWayPropagation',true,'SampleRate',fs); radarplt = phased.Platform('InitialPosition',[0;0;0], ... 'OrientationAxesOutputPort',true); trx = phased.Transmitter('PeakPower',1,'Gain',25); rcvx = phased.ReceiverPreamp('Gain',25,'NoiseFigure',10);
Создать bicyclist объект движется со скоростью 4 метра/с.
bicyclistSpeed = 4; bicyclist = backscatterBicyclist('InitialPosition',[5;0;0],'Speed',bicyclistSpeed, ... 'PropagationSpeed',c,'OperatingFrequency',fc,'InitialHeading',0.0); lambda = c/fc; fmax = 2*bicyclist.GearTransmissionRatio*bicyclistSpeed/lambda; tsamp = 1/(2*fmax);
Закольцевать более 1000 импульсов. Найдите угол падения радара. Распространить волну на каждый рассеиватель, а затем отразить волну от рассеивателей обратно на радар.
npulse = 1000; xr = complex(zeros(round(fs*tm),npulse)); for m = 1:npulse [posr,velr,axr] = radarplt(tsamp); [post,velt,axt] = move(bicyclist,tsamp,0); [~,angrt] = rangeangle(posr,post,axt); x = trx(wav()); xt = chan(repmat(x,1,size(post,2)),posr,post,velr,velt); xr(:,m) = rcvx(reflect(bicyclist,xt,angrt)); end
Обработка поступающих сигналов. Сначала дехирпируют сигнал, а затем передают сигнал в короткое преобразование Фурье с использованием окна Кайзера.
xd = conj(dechirp(xr,x)); M = 128; beta = 6; w = kaiser(M,beta); R = floor(1.7*(M-1)/(beta+1)); noverlap = M - R; [S,F,T] = stft(sum(xd),1/tsamp,'Window',w,'FFTLength',M*2, ... 'OverlapLength',noverlap); maxval = max(10*log10(abs(S))); pcolor(T,-F*lambda/2,10*log10(abs(S))-maxval); shading flat; colorbar xlabel('Time (sec)') ylabel('Speed (m/s)')

Создание пользовательского шаблона RCS для использования с backscatterBicyclist объект.
Шаблон RCS вычисляется из косинусов, поднятых до четвертой мощности. Постройте график.
az = [-180:180]; el = [-90:90]; caz = cosd(az').^4; cel = cosd(el).^4; rcs = (caz*cel)'; imagesc(az,el,rcs) xlabel('Azimuth (deg)') ylabel('Elevation (deg)') colorbar

bicyclist = backscatterBicyclist( ... 'NumWheelSpokes',18,'Speed',10.0, ... 'InitialPosition',[0;0;0],'InitialHeading',90, ... 'GearTransmissionRatio',5.5,'AzimuthAngles',az, ... 'ElevationAngles',el,'RCSPattern',rcs);
Велосипедист состоит из пяти основных компонентов: рамы велосипеда и наездника, педалей, ног наездника, переднего колеса, заднего колеса. Каждый компонент содержит множество рассеивателей. Все компоненты перемещаются со скоростью, определяемой указанными свойствами скорости и курса. Кроме того, ноги, педали и колеса подвергаются циклическому движению, определяемому скоростью.
Рассеиватели на раме и наезднике закреплены относительно велосипедиста и движутся со скоростью эго
где v - скорость велосипеда, указанная Speed и H является заголовком, указанным InitialHeading собственность. Эти свойства можно изменить путем вызова move функция.
На этом рисунке показано расположение рассеивателей на раме велосипеда и наезднике.
Рассеиватели на педалях перемещаются вместе с велосипедистом, но также могут вращаться вокруг коленчатого шпинделя с радиусом вращения Rпед. Имеется два возможных движения педалей в зависимости от того, катается ли велосипед по карусели (свободно) или нет:
Когда велосипед катается, педали не вращаются вокруг коленчатого шпинделя, и скорость рассеивателей педалей равна скорости велосипеда. Их положения относительно велосипедиста зафиксированы. Coasting включается путем установки Coast свойство для true или путем установки coast аргумент move объектная функция для true. Скорость педали составляет
Когда велосипед не катается, гонщик педалирует. Угловая скорость педалей связана с угловой скоростью колес
где G - передаточное число, определяемое GearTransmissionRatio собственность. Скорость рассеивателя педали равна скорости вращения педали, умноженной на расстояние от педали до кривошипно-шатунного шпинделя. Векторная форма этого отношения:
Скорость педали по отношению к велосипедисту равна
Coasting отключается путем установки Coast свойство для false или путем установки coast аргумент move объектная функция для false.
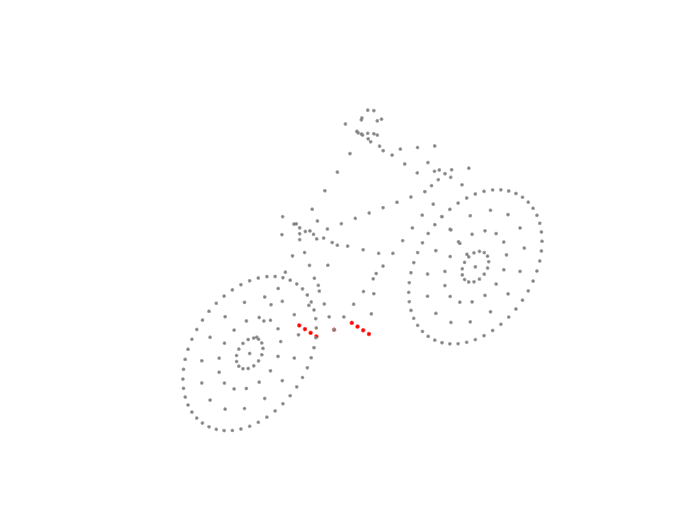
На этом рисунке показаны местоположения рассеивателей педалей.
Рассеиватели на верхней и нижней ногах гонщика передвигаются вместе с велосипедом с добавленным циклическим движением. Есть два возможных движения ног в зависимости от того, катается велосипед или нет:
Когда велосипед катается, ноги не движутся относительно велосипеда, а рассеиватели движутся со скоростью велосипедиста. Coasting включается путем установки Coast свойство для true или путем установки coast аргумент move объектная функция для true.
Когда велосипед не катается, верхняя и нижняя ноги совершают возвратно-поступательное движение. Верхние ноги частично вращаются вокруг бедра гонщика. Ножка крепится к педали и вращается вместе с педалью. Колено соединяет нижнюю и верхнюю ноги. Места расположения стопы и бедер всадника определяют места расположения коленей и движения рассеивателей на ногах.
Coasting отключается путем установки Coast свойство для false или путем установки coast аргумент move объектная функция для false.
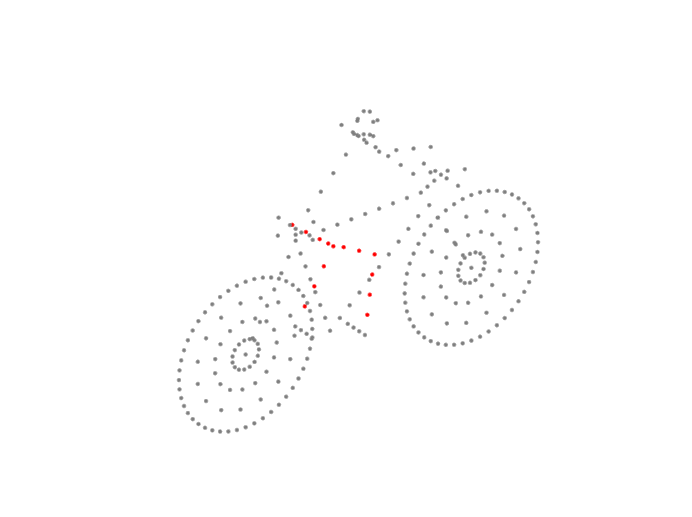
На этом рисунке показано расположение рассеивателей на верхней и нижней ногах всадника.
Рассеиватели находятся на спицах и ободах колес и вращаются вокруг оси колеса на различных расстояниях, rspk, от оси. Скорость рассеивателей в системе координат велосипедистов равна
Абсолютная скорость рассеивателя спицы или ободка равна
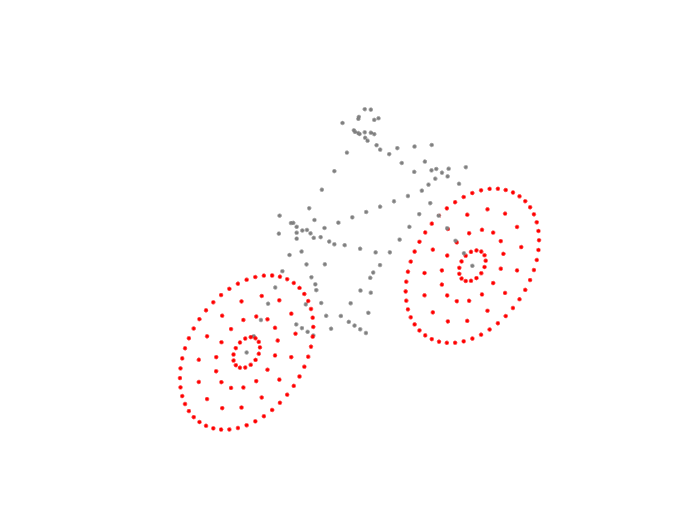
На этом рисунке показано расположение рассеивателей на колесных ободах и спицах.
[1] Stolz, M. et al. Европейская радиолокационная конференция (EURAD) 2017, Нюрнберг, 2017, стр. 94-97.
[2] Чен, В., Д. Тахмуш и У. Дж. Мицели. Радиолокационные микро-доплеровские подписи: обработка и применение. Инженерно-технологическое учреждение: Лондон, 2014.
[3] Belgiovane, D. и К. К. Чен. 10-я Европейская конференция по антеннам и распространению (EuCAP) 2016, Давос, 2016, стр. 1-5.
[4] Виктор Чен, микро-доплеровский эффект в радаре. Норвуд, Массачусетс: Artech House, 2011.
backscatterPedestrian | getNumScatterers | move | phased.BackscatterRadarTarget | phased.BackscatterSonarTarget | phased.RadarTarget | phased.WidebandBackscatterRadarTarget | plot | reflect
