3DOF твердый корпус транспортного средства для вычисления продольного, вертикального и тангажа
Блок-набор силовых агрегатов/динамика автомобиля
Динамика автомобиля транспортное средство
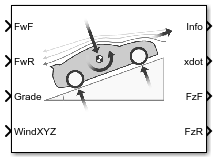
Блок Vehicle Body 3DOF Longitudinal реализует модель жесткого кузова автомобиля с тремя степенями свободы (3DOF) с конфигурируемой жесткостью оси, чтобы вычислить продольное, вертикальное и наклонное движение. Блок учитывает массу тела, аэродинамическое сопротивление, наклон дороги и распределение веса между осями из-за ускорения и профиля дороги.
Можно задать тип крепления оси к транспортному средству:
Угол уклона - вертикальное перемещение оси от поверхности дороги к осям остается постоянным. Блок использует табличные параметры жесткости и демпфирования, чтобы смоделировать силы подвески, действующие между кузовом транспортного средства и осями.
Перемещение Оси - Оси имеют установленные на входе вертикальное перемещение и скорость относительно уровня дороги. Блок использует табличные параметры жесткости и демпфирования, чтобы смоделировать силы подвески, действующие между кузовом транспортного средства и осью.
Внешняя подвеска - Оси имеют внешне приложенные силы для связи кузова транспортного средства с пользовательскими моделями подвески.
Если перенос веса от вертикального и тангажа не незначительны, рассмотрите использование этого блока для представления движения транспортного средства в исследованиях экономии электроэнергии и топлива. Например, в исследованиях с тяжелым разрушением или ускорением или профилями дорог, которые содержат большие вертикальные изменения.
Блок использует движение транспортного средства с твердым телом, силы системы подвески и силы ветра и сопротивления, чтобы вычислить нормальные силы на передней и задней осях. Блок разрешает компоненты силы и моменты на твердом каркасе кузова транспортного средства:
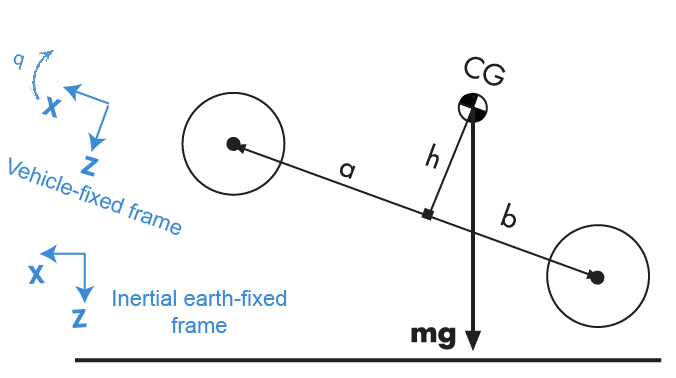
Оси транспортного средства параллельны и образуют плоскость. Продольное направление лежит в этой плоскости и перпендикулярно осям. Если транспортное средство двигается по наклонному склону, нормальное направление не параллельно гравитации, но всегда перпендикулярно продольной плоскости оси.
Блок использует чистый эффект всех сил и крутящих моментов, действующих на него, чтобы определить движение транспортного средства. Продольные усилия шин толкают транспортное средство вперед или назад. Вес транспортного средства действует через центр тяжести (CG). В зависимости от наклонного угла, вес тянет транспортное средство к земле и либо вперед, либо назад. Двигается ли транспортное средство вперед или назад, аэродинамическое сопротивление замедляет ее вниз. Для простоты, перетаскивание принято, чтобы действовать через CG.
Этот Vehicle Body 3DOF Longitudinal реализует эти уравнения.
Если вы конфигурируете блок с параметром Ground interaction type Grade angle или Axle displacement, velocityблок использует нелинейные параметры жесткости и демпфирования для моделирования системы подвески.
Силы подвески передней и задней осей заданы:
Блок использует интерполяционные таблицы, чтобы реализовать жесткость передней и задней подвески. Для учета кинематической и материальной нелинейности, включая столкновения с конечными упорами, таблицы являются функциями штриха.
Блок использует интерполяционные таблицы, чтобы реализовать демпфирование передней и задней подвески. Для расчета нелинейности, сжатия и отскока таблицы являются функциями скорости штриха.
Штрих является различием в транспортное средство вертикальном и осевом положениях. Скорость штриха является различием в вертикальной и осевой скоростях.
Когда параметр Ground interaction type Grade angle, вертикальные положения оси () и скорости () установлены в 0.
Блок вычитает скорости ветра из компонентов скорости транспортного средства, чтобы получить чистую относительную воздушную скорость. Чтобы вычислить силу сопротивления и моменты, действующие на транспортное средство, блок использует чистую относительную воздушную скорость:
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Внешне приложенная продольная сила степени | |
| Внешне приложенная продольная сила степени | |||
| Внешне приложенная степень момента тангажа | |||
| Продольная сила, приложенная к передней оси | |||
| Продольная сила, приложенная к задней оси | |||
|
|
| Внутренняя степень, передаваемая между подвеской и кузовом транспортного средства на передней оси | ||
| Внутренняя степень, передаваемая между подвеской и кузовом транспортного средства на задней оси | |||
| Сила продольного сопротивления степени | |||
| Вертикальная степень перетаскивания | |||
| Перетащите степень момента тангажа | |||
| Полное демпфирование подвески степени | |||
|
|
| Изменение скорости в гравитационной потенциальной энергии | ||
| Скорость изменения продольной кинетической энергии | |||
| Скорость изменения продольной кинетической энергии | |||
| Скорость изменения кинетической энергии вращательного тангажа | |||
| Сохраненная энергия пружины от передней подвески | |||
| Сохраненная энергия пружины от задней подвески | |||
В уравнениях используются эти переменные.
| Fx | Продольная сила на транспортное средство |
| Fz | Нормальная сила на транспортном средстве |
| My | Крутящий момент на транспортном средстве вокруг фиксированной по оси Y автомобиля |
| FwF, FwR | Продольная сила на передней и задней осях вдоль фиксированной оси X автомобиля |
| Fd,x, Fd,z | Продольная и нормальная сила сопротивления на транспортном средстве CG |
| Fsx,F, Fsx,R | Сила продольной подвески на передней и задней осях |
| Fsz,F, Fsz,R | Нормальное усилие подвески на передней и задней осях |
| Fg,x, Fg,z | Продольная и нормальная сила тяжести на транспортном средстве вдоль неподвижной системы координат автомобиля |
| Md,y | Крутящий момент из-за перетаскивания транспортного средства вокруг фиксированной по оси Y автомобиля |
| a, b | Расстояние между передней и задней осями, соответственно, от точки нормальной проекции CG транспортного средства до плоскости общей оси |
| h | Высота CG транспортного средства над плоскостью оси вдоль фиксированной оси Z транспортного средства |
| FsF, FsR | Сила подвески передней и задней осей вдоль фиксированной оси Z автомобиля |
| ZwF, ZwR | Нормальное положение переднего и заднего транспортных средств вдоль фиксированной по земле оси Z |
| Θ | Угол тангажа транспортного средства вокруг фиксированной по оси Y автомобиля |
| m | Масса кузова транспортного средства |
| NF, NR | Количество передних и задних колес |
| Iyy | Момент инерции тела транспортного средства вокруг фиксированной по оси Y автомобиля |
| x, , | Продольное положение, скорость и ускорение транспортного средства вдоль фиксированной оси X |
Нормальное положение, скорость и ускорение транспортного средства вдоль фиксированной оси Z | |
| FkF, FkR | Сила жесткости подвески переднего и заднего колес вдоль фиксированной оси Z автомобиля |
| FbF, FbR | Сила демпфирования подвески переднего и заднего колес вдоль фиксированной оси Z автомобиля |
| ZF, ZR | Вертикальное положение переднего и заднего транспортных средств вдоль фиксированной по земле оси Z |
Вертикальная скорость переднего и заднего транспортного средства вдоль фиксированной оси Z автомобиля | |
Вертикальное положение оси переднего и заднего колес вдоль фиксированной оси Z транспортного средства | |
Вертикальная скорость оси переднего и заднего колес вдоль фиксированной по земле оси Z | |
| dZF, dZR | Отклонение подвески передней и задней осей вдоль фиксированной оси Z автомобиля |
Скорость отклонения подвески передней и задней осей вдоль фиксированной оси Z автомобиля | |
| Cd | Коэффициент лобового сопротивления воздуха, действующий вдоль фиксированной оси X автомобиля |
| Cl | Коэффициент сопротивления бокового воздуха, действующий вдоль фиксированной оси Z автомобиля |
| Cpm | Момент тангажа сопротивления воздуха, действующий вокруг фиксированной по оси Y автомобиля |
| Af | Фронтальная область |
| Pabs | Абсолютное давление окружающей среды |
| R | Удельная атмосферная газовая константа |
| T | Температура воздуха окружающей среды |
| wx | Скорость ветра вдоль фиксированной оси X автомобиля |
[1] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Общество автомобильных инженеров, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. J670 SAE. Warrendale, PA: Общество автомобильных инженеров, 2008.
[3] Технический комитет. Дорожные транспортные средства - Динамика аппарата и способность удерживать дороги - Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011 год.
