AUTOSAR Blockset позволяет вам сконфигурировать калибровку адаптивных данных приложений во время выполнения на основе подчиненной связи XCP и генерации ASAP2 (A2L) файлов. Возможности XCP и ASAP2 определяются вне спецификации Adaptive Platform (AP), которая на релиз 19-11 не касается калибровки данных.
В рамках генерации и развертывания адаптивного кода можно сконфигурировать интерфейсы для подчиненной связи XCP в сгенерированном коде С++ и экспортировать файлы A2L, содержащие данные модели для измерения и калибровки.
Перед развертыванием адаптивного кода:
В диалоговом окне Параметров конфигурации сконфигурируйте модель, чтобы сгенерировать вызовы ведомых функций XCP в адаптивных Кодах С++ и сгенерировать раздел XCP в ASAP2 (A2L) файле.
В галерее Share под вкладкой AUTOSAR модели используйте Generate Calibration Files для генерации ASAP2 (A2L) файлов, которые содержат данные модели для измерения и калибровки.
Чтобы включить возможность связи, используйте параметр конфигурации адаптивной модели AUTOSAR Transport layer (Embedded Coder), чтобы выбрать транспортный слой XCP. Когда транспортный слой установлен в значение, отличное от None, Simulink® добавляет вызовы ведомых функций XCP к сгенерированному коду С++. По умолчанию инструмент использует MathWorks® Ведомый стек XCP.
Выбор транспортного слоя XCP включает другие параметры XCP. На этом изображении показаны параметры конфигурации ведомой модели XCP.
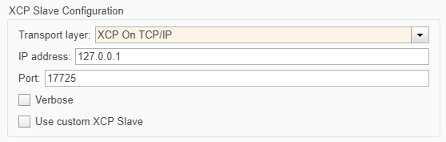
Используя параметры конфигурации модели, можно:
Укажите транспортный слой, который необходимо использовать для связи.
Укажите IP-адрес конечного компьютера и номер порта. Вы можете использовать порт только для одного приложения.
При необходимости включите подробные сообщения для подчиненного сервера XCP.
Опционально вместо ведомого сервера MathWorks XCP можно использовать пользовательскую ведомую реализацию XCP, основанную на транспортном слое Ethernet. Чтобы использовать пользовательское подчиненное устройство XCP, предоставьте реализации функций, объявленных в файле заголовка подчиненного устройства XCP, используя пользовательские команды API подчиненного устройства XCP. Файл ведомого заголовка XCP расположен в MATLAB® папка установки matlabroot/ toolbox/coder/autosar/adaptive
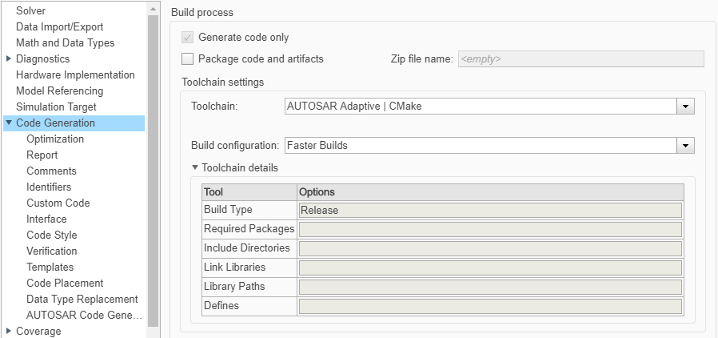
Добавьте пользовательские детали подчиненного сервера XCP в параметре конфигурации Toolchain details или добавьте подробные данные вручную к CMakeLists.txt файл.
Чтобы сгенерировать ASAP2 (A2L) файлы, используйте Generate Calibration Files из галереи Share под вкладкой AUTOSAR модели. Для получения дополнительной информации смотрите Сгенерировать ASAP2 и файлы калибровки CDF (Simulink Coder).
Транспортный слой (Embedded Coder) | coder.asap2.export (Simulink Coder)
