NA-MAAB - a
JMAAB - a
Все
Сигнальные линии должны использоваться, чтобы соединить данные, которые являются общими между блоками MATLAB Function (Simulink).
Неприменимо
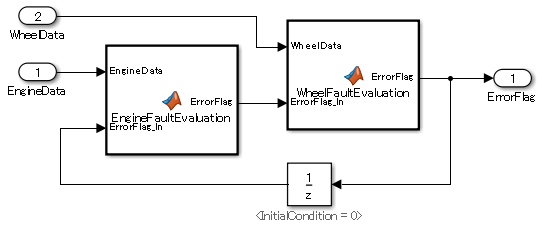
function ErrorFlag = EngineFaultEvaluation(EngineData,ErrorFlag_In) %#codegen RMP_HIGH = 10000; RMP_LOW = 10; HIGHRPMFAULT = 2^1; LOWRPMFAULT = 2^2; ErrorFlag = ErrorFlag_In; if EngineData > RPM_HIGH ErrorFlag = bitor(ErrorFlag,HIGHRPMFAULT); end if EngineData < RPM_LOW ErrorFlag = bitor(ErrorFlag,LOWRPMFAULT); end function ErrorFlag = WheelFaultEvaluation(WheelData,ErrorFlag_In) %#codegen SLIP_HIGH = 1000; WHEELSLIP = 2^3; ErrorFlag = ErrorFlag_In; if WheelData > SLIP_HIGH ErrorFlag = bitor(ErrorFlag,WHEELSLIP); end end
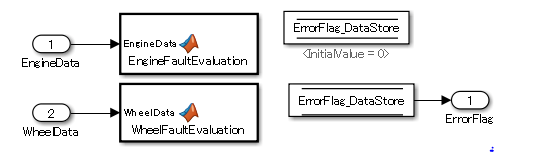
function EngineFaultEvaluation(EngineData) %#codegen global ErrorFlag_DataStore RMP_HIGH = 10000; RMP_LOW = 10; HIGHRPMFAULT = 2^1; LOWRPMFAULT = 2^2; if EngineData > RPM_HIGH ErrorFlag_DataStore = bitor(ErrorFlag_DataStore,HIGHRPMFAULT); end if EngineData < RPM_LOW ErrorFlag_DataStore = bitor(ErrorFlag_DataStore,LOWRPMFAULT); end function WheelFaultEvaluation(WheelData) %#codegen global ErrorFlag_DataStore SLIP_HIGH = 1000; WHEELSLIP = 2^3; if WheelData > SLIP_HIGH ErrorFlag_DataStore = bitor(ErrorFlag_DataStore,WHEELSLIP); end end
Идентификатор подраздела a:
Когда используется хранилище данных, удобочитаемость потока данных уменьшается и может привести к ошибкам в опорном тайминге обновления.
Проверка Model Advisor: Проверьте код MATLAB на глобальные переменные (Simulink Check)
R2020a
Руководство JMAAB na_0024, которое доступно в Руководствах по моделированию алгоритма управления с использованием MATLAB, Simulink и Stateflow на MathWorks® веб-сайт.
Реализация функций MATLAB с использованием блоков (Simulink)
Сигнальные линии (Simulink)
