Компенсируйте CIC-фильтр с помощью конечной импульсной характеристики интерполятора
Фильтрация/фильтрация проектов
dspfdesign
Блок CIC Compensation Interpolator использует интерполятор конечной импульсной характеристики полифазы в качестве фильтра компенсации. Интерполяторы компенсации CIC являются фильтрами с несколькими конечных импульсных характеристик, которые могут быть каскадированы с помощью интерполяторов CIC, чтобы уменьшить недостатки фильтров CIC.
Фильтры интерполяции CIC используются в областях, которые требуют высокой интерполяции. Эти фильтры популярны в ASIC и FPGA, поскольку они не имеют никаких умножителей. CIC-фильтры имеют два недостатка:
CIC-фильтры имеют величину ответ, который вызывает падение в области полосы пропускания. Эта величина:
M - дифференциальная задержка
n - Количество этапов
ω - Нормированная угловая частота
CIC-фильтры имеют широкую переходную область.
Фильтры интерполятора компенсации имеют обратную характеристику полосы пропускания синуса, чтобы исправить падение CIC, и они имеют узкую ширину перехода.
Этот блок приносит возможности dsp.CICCompensationInterpolator Системные object™ к Simulink® окружение.
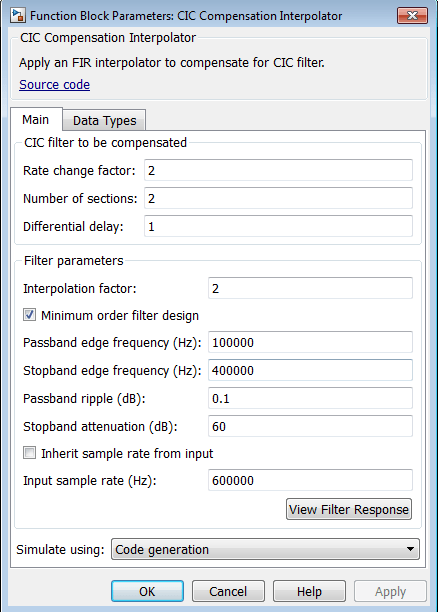
Коэффициент изменения скорости для CIC-фильтра, который будет компенсирован, задается как положительное скалярное целое число. Значение по умолчанию является 2.
Количество интеграторов и гребенчатых секций CIC-фильтра, подлежащих компенсации, задается как положительное скалярное целое число. Значение по умолчанию является 2.
Значение задержки, используемое в каждой из гребенчатых секций CIC-фильтра, подлежащего компенсации, задается как положительное скалярное целое число. Значение по умолчанию является 1.
Коэффициент интерполяции компенсатора, заданный как положительное скалярное целое число. Значение по умолчанию 2.
Когда вы устанавливаете этот флажок, блок проектирует фильтры с минимальным порядком, который удовлетворяет спецификациям частоты полосы пропускания, частоты полосы остановки, неравномерности в полосе пропускания и затухания в полосе задерживания. Когда вы снимаете этот флажок, блоки проектируют фильтры с порядком, который вы задаете в Filter order.
По умолчанию этот флажок установлен.
Порядок фильтра компенсации, заданный как положительное скалярное целое число. Значение по умолчанию является 12.
Ребро полосы пропускания корректирующего фильтра, заданная как действительная положительная скалярная величина в Гц. Passband edge frequency (Hz) должно быть меньше Fs/2, где Fs - выходная частота выборки. Значение по умолчанию является 100000.
Частота ребра стоповой полосы корректирующего фильтра, заданная как действительная положительная скалярная величина в герце. Stopband edge frequency (Hz) должно быть меньше Fs/2, где Fs - выходная частота выборки. Значение по умолчанию является 400000.
Неравномерность в полосе пропускания компенсационного фильтра, заданный как действительная положительная скалярная величина в дБ. Значение по умолчанию является 0.1.
Затухание в полосе задерживания компенсационного фильтра, заданный как действительная положительная скалярная величина в дБ. Значение по умолчанию является 60.
Когда вы устанавливаете этот флажок, блок наследует свою частоту дискретизации от входного сигнала. При снятии этого флажка необходимо задать частоту дискретизации в Input sample rate (Hz).
Входная частота выборки, заданная в виде скаляра в Гц. Значение по умолчанию является 600000.
Открывает FVTool инструмента визуализации фильтра и отображает амплитуду/фазовую характеристику CIC Compensation Interpolator. Ответ основан на параметрах диалогового окна блока. Изменения, внесенные в эти параметры, обновляют FVTool.
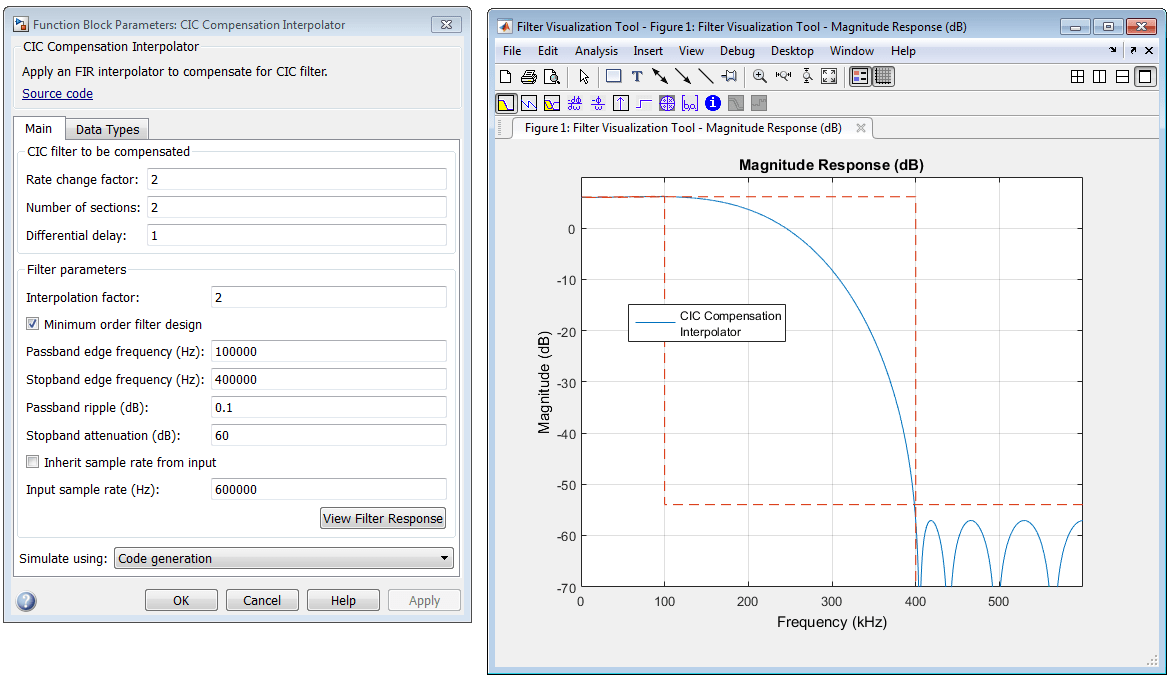
Чтобы обновить ответ величины во время работы FVTool, измените параметры диалогового окна и нажатия кнопки Apply.
Тип выполняемой симуляции. Можно задать этот параметр как:
Code generation (по умолчанию)
Симулируйте модель с использованием сгенерированного кода C. При первом запуске симуляции Simulink генерирует код С для блока. Код С повторно используется для последующих симуляций, пока модель не меняется. Эта опция требует дополнительного времени запуска, но обеспечивает более высокую скорость симуляции, чем Interpreted execution.
Interpreted execution
Симулируйте модель с помощью MATLAB® интерпретатор. Эта опция сокращает время запуска, но имеет более низкую скорость симуляции, чем Code generation.

Метод округления для выходных операций с фиксированной точкой. Методы округления Ceiling, Convergent, Floor, Nearest, Round, Simplest, и Zero. Значение по умолчанию является Floor.
Тип данных с фиксированной точкой коэффициентов, заданный как один из следующих:
fixdt(1,16) (по умолчанию) - тип данных с фиксированной точкой со знаком «размер слова» 16, с двоичным масштабированием точек. Блок автоматически определяет длину дроби из значений коэффициентов таким образом, чтобы коэффициенты занимали максимальную представляемую область значений без переполнения.
fixdt(1,16,0) - Тип данных с фиксированной точкой со знаком 16, длина дроби 0. Вы можете изменить длину дроби на любое другое целое значение.
<data type expression> - Задайте тип данных коэффициентов с помощью выражения, которое вычисляет объект типа данных, например, числовой тип (fixdt([ ], 16, 15), чтобы задать тип данных коэффициентов. Задайте режим знака для этого типа данных следующим [ ] или true.
Refresh Data Type - Обновляется до типа данных по умолчанию.
Нажмите кнопку Show data type assistant![]() , чтобы отобразить ассистента по типу данных, который помогает вам задать параметр входа уровня.
, чтобы отобразить ассистента по типу данных, который помогает вам задать параметр входа уровня.
Дополнительные сведения см. в разделе «Установка типов данных с использованием помощника по типам данных» (Simulink).
| Порт | Поддерживаемые типы данных |
|---|---|
Вход |
|
Выход |
|
dsp.CICCompensationInterpolator | DSP System Toolbox |
| CIC Compensation Decimator | DSP System Toolbox |
Ответ CIC-фильтра задается:
R, D и N являются коэффициентом изменения скорости, дифференциальной задержкой и количеством секций CIC-фильтра, соответственно.
После десятикратного уменьшения cic-ответ имеет форму: okay
Нормированная версия этого последнего ответа является той, которую должен компенсировать компенсатор CIC. Следовательно, ответ полосы пропускания компенсатора CIC должен иметь следующую форму:
где ω p - ширина полосы пропускания фильтра коррекции CIC.
Заметьте что, когда <reservedrangesplaceholder5>/2 <reservedrangesplaceholder4> π, предыдущее уравнение для Hciccomp (<reservedrangesplaceholder2>) может быть упрощено, используя факт, которые грешат (<reservedrangesplaceholder1>) ≅ <reservedrangesplaceholder0>:
Это предыдущее уравнение является обратным приближением синуса к истинной обратной полосе пропускания CIC-фильтра.
