Программное обеспечение Mapping Toolbox™ поддерживает три различные интерпретации геолокированных сетей данных:
Во-первых, матрица карты, имеющая одинаковое число строк и столбцов, что и матрицы координат широты и долготы, представляет значения данных карты в соответствующих географических точках (центрах камер данных).
Затем матрица карты, имеющая на одну меньше строку и на один меньше столбец, чем матрицы географических координат, представляет значения данных карты в области, образованной четырьмя смежными широтами и долготами.
Наконец, если матрицы широты и долготы имеют меньшие размерности, чем матрица карты, можно интерпретировать их как описание более грубой гратикулы или mesh камер широты и долготы, в которую деформируются блоки данных карты.
В этом разделе рассматриваются первые две интерпретации геолокированных сетей данных. Для получения дополнительной информации об использовании гратикул смотрите The Map Grid.
В качестве примера первой интерпретации рассмотрим матрицу карты 4 на 4, размер камеры которой составляет 30 на 30 степени, наряду с соответствующими матрицами широты и долготы 4 на 4:
Z = [ ... 1 2 3 4; ... 5 6 7 8; ... 9 10 11 12; ... 13 14 15 16]; lat = [ ... 30 30 30 30; ... 0 0 0 0; ... -30 -30 -30 -30; ... -60 -60 -60 -60]; lon = [ ... 0 30 60 90;... 0 30 60 90;... 0 30 60 90;... 0 30 60 90];
Отображение геолокированной сетки данных со значениями map показаны в связанных широтах и долготах:
figure('Color','white','Colormap',autumn(64))
axesm('pcarree','Grid','on','Frame','on',...
'PLineLocation',30,'PLabelLocation',30)
mlabel; plabel; axis off; tightmap
h = geoshow(lat,lon,Z,'DisplayType','surface');
set(h,'ZData',zeros(size(Z)))
ht = textm(lat(:),lon(:),num2str(Z(:)), ...
'Color','blue','FontSize',14);
colorbar('southoutside')
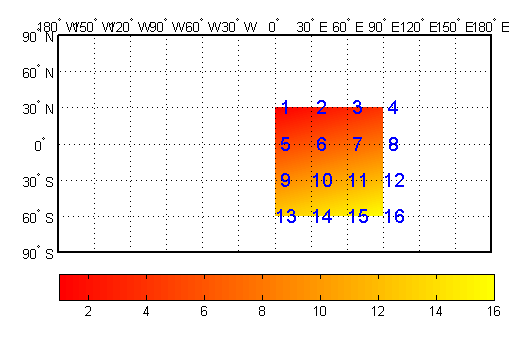
Заметьте, что отображаются только 9 из 16 камер. Значение, отображаемое для каждой камеры, является значением в верхнем левом углу этой камеры, координаты которого заданы соответствующей lat и lon элементы. По соглашению последняя строка и столбец матрицы карты не отображаются, хотя и существуют в CData свойство объекта поверхности.
Для второй интерпретации рассмотрим матрицу карты 3 на 3 с той же lat и lon переменные:
delete(h)
delete(ht)
Z3by3 = [ ...
1 2 3; ...
4 5 6; ...
7 8 9];
h = geoshow(lat,lon,Z3by3,'DisplayType','texturemap');
tlat = [ ...
15 15 15; ...
-15 -15 -15; ...
-45 -45 -45];
tlon = [ ...
15 45 75; ...
15 45 75; ...
15 45 74];
textm(tlat(:),tlon(:),num2str(Z3by3(:)), ...
'Color','blue','FontSize',14)
Отобразите объемную поверхностную диаграмму матрицы карты со значениями map показано в центре связанных камер:
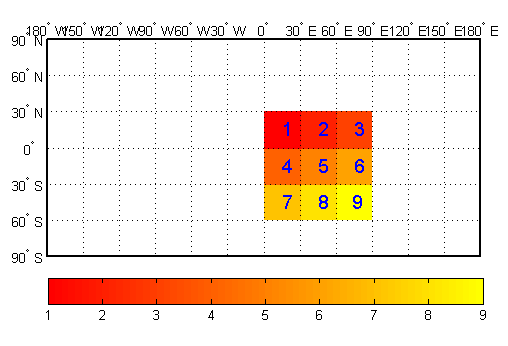
Для этой геолокированной сетки данных отображаются все данные карты. Значение каждой камеры является значением в центре камеры, а широты и долготы в координатных матрицах являются контурами для камер.
Вы, возможно, заметили, что первая строка матрицы отображается как верхняя часть карты, в то время как для регулярной сетки данных было верно обратное: первая строка соответствовала нижней части карты. Это различие полностью связано с тем, как lat и lon матрицы упорядочены. В геолокированной сетке данных порядок значений в двух матрицах координат определяет расположение отображаемых значений.
При необходимости регулярная сетка данных может быть преобразована в геолокированную сетку данных. Это просто требует, чтобы пара матриц координат была вычислена с желаемым пространственным разрешением от регулярной сетки. Для примера загрузите повышение растровые данные и географические камеры ссылки объект. Затем создайте сетку широта-долгота для данных путем вызова geographicGrid функция.
load topo60c
[lat,lon] = geographicGrid(topo60cR);
И наоборот, регулярная сетка данных может также быть создана из геолокированной сетки данных. Координаты и значения могут быть встроены в новую регулярную сетку данных. Функция, которая выполняет это преобразование, geoloc2grid; в качестве входных параметров используются геолокированная сетка данных и размер камеры.
