Пример модели в модели Drivetrain иллюстрирует типовую систему ходовой части, которую можно смоделировать с помощью Simscape™ Driveline™ программного обеспечения. Он также иллюстрирует ключевые правила для соединения блоков привода друг с другом и двойные роли линий физического соединения Simscape в моделировании привода. В механической области Simscape:
Поперечная переменная является угловой или линейной скоростью, в зависимости от типа механических портов, к которым вы соединяете, вращательной или поступательной. Вдоль любой соединительной линии скорость одинаковая.
В зависимости от типа механических портов, к которым вы соединяетесь, переменная through является крутящим моментом или силой. Крутящие моменты и силы сохраняются вдоль линии соединения и равны нулю в точках ветви линии.
Прежде чем создавать и запускать обучающие модели, проверьте эти правила.
Блоки Driveline имеют механические порты и![]() , в некоторых случаях, порты физического сигнала.
, в некоторых случаях, порты физического сигнала. ![]() Механические порты можно подключить только к другим механическим портам, а порты физического сигнала - только друг к другу.
Механические порты можно подключить только к другим механическим портам, а порты физического сигнала - только друг к другу.
Вы не можете смешивать вращательные и поступательные порты или соединить механический порт с портом физического сигнала.
Линии физического соединения, соединяющие механические порты![]() , представляют оси привода и приводят в действие физические отношения. В отличие от физического сигнала и Simulink® линии, они не представляют сигналы или математические операции, и они не имеют присущей им направленности.
, представляют оси привода и приводят в действие физические отношения. В отличие от физического сигнала и Simulink® линии, они не представляют сигналы или математические операции, и они не имеют присущей им направленности.
Соединительная линия привода представляет собой идеализированный безмассовый и идеально жесткий вращающийся вал или ось перемещения. Линия соединения привода между двумя портами ограничивает два компонента привода, которые соединяются с линией, чтобы вращаться или перемещаться с одной и той же скоростью.
Можно ответвить линии механического соединения. Соедините конец любой ветви линии механического соединения с механическим портом.![]()
Ветвление соединительной линии привода изменяет физические ограничения, которые она представляет. Все компоненты привода, соединенные с концами набора разветвленных линий, вращаются или перемещаются с той же скоростью. Для линий, ответвленных от точки ветви, сумма всех крутящих моментов или сил, протекающих в, равна сумме всех крутящих моментов или сил, вытекающих наружу. То, как крутящий момент или сила разделены, зависит от определяющих уравнений присоединенных блоков в остальной части системы.
Механические соединительные линии, удовлетворяющие ограничению скорости, должны иметь одинаковые начальные скорости.
Ответвление соединительных линий привода
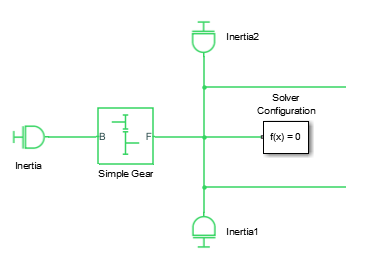
Блок Solver Configuration в этом примере не использует крутящий момент. Это разделяет ограничение скорости вращения от точки ветви. Символически условия ветвления на соединительных линиях привода:
<reservedrangesplaceholder2> 1 = <reservedrangesplaceholder1> 2 = <reservedrangesplaceholder0> 3...
и
<reservedrangesplaceholder2> 1 + <reservedrangesplaceholder1> 2 + <reservedrangesplaceholder0> 3 +... = 0
Конвенция о знаках заключается в том, что крутящие моменты, протекающие внутрь, положительны. Как и все оси привода, эти элементы не имеют присущей им направленности. Направления потока крутящего момента заданы общими системными уравнениями во время симуляции.
Крутящий момент и движение передаются через приводную линию от одних приводных валов к другим. Некоторые блоки Simscape Driveline требуют явной направленности и представляют его путем обозначения одного порта соединителя привода как вход основы (B), а другого как выхода последующего устройства (F) или некоторой эквивалентной пары. При необходимости измеряют положительное относительное движение осей привода или валов как последующее относительно основания.
Движение абсолютно
Кроме тех случаев, когда явно требуется относительное движение, все движения в моделях Simscape Driveline и Simscape измеряются в неявных абсолютных координатах. Блоки Mechanical Rotational Reference и Mechanical Translational Reference определяют абсолютную нулевую скорость. Если они соединяются с осью привода, эти блоки закрепляют это состояние нулевого движения на этой оси.
