Этот пример показывает, как моделировать системы, которые охватывают электрические и механические области. Вы узнаете, как смоделировать физические компоненты с помощью блоков Simscape™, соединить их в реалистичную модель, используйте Simulink® также блокирует, а затем моделирует и изменяет модель электродвигателя.
Модель основана на Faulhaber Series 0615 DC-Micromotor. Модель использует эквивалентные параметры схемы для 1.5V двигателя, чтобы проверить цитируемую производителем скорость без нагрузки, ток без нагрузки и крутящий момент остановки. Можно использовать модель для оценки эффективности двигателя в заданном приложении путем добавления необходимой модели механической нагрузки.
Чтобы открыть модель примера двигателя постоянного тока с постоянными магнитами, введите ssc_dcmotor в MATLAB® Командное окно.
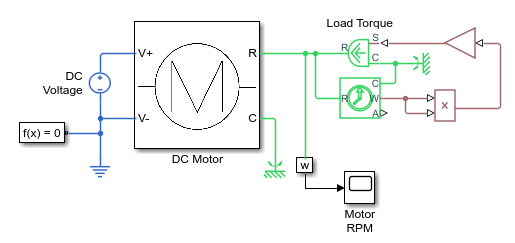
Главная модель
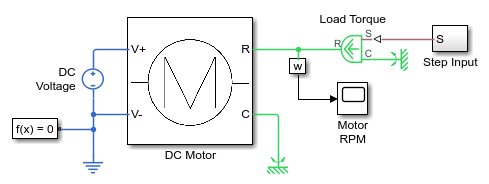
Модель содержит подсистему двигателя постоянного тока с двумя электрическими и двумя механическими портами вращения.
Для улучшения читаемости блоков каждая область Simscape использует отдельный цвет и стиль линии по умолчанию для соединительных линий. В этом блоке, например, электрическая схема обозначена темно-синим цветом соединительных линий, в то время как соединительные линии между портами механического вращений являются светло-зелеными. Линии физического сигнала коричневые.
Электрические порты двигателя соединяются с электрической схемой, которая состоит из блока Electrical Reference, представляющего электрическую землю, и источника напряжения постоянного тока 1,5 В.
На механической стороне Mechanical Rotational Reference блок представляет точку ссылки для других элементов.
Нагрузка на двигатель представлена блоком с именем Крутящий Момент Нагрузки, который является блоком Ideal Torque Source. С одной стороны он соединяется с блоком Mechanical Rotational Reference, а с другой стороны с валом мотора. Крутящий момент нагрузки задается подсистемой Вход, соединенной через физический сигнал с портом управления S блока Load Torque.
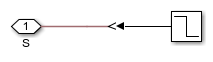
Подсистема Вход содержит регулярный источник Simulink Step, который обеспечивает сигнал управления. Блок Simulink-PS Converter преобразует сигнал управления в физический сигнал и применяет его к порту управления блока Крутящий Момент Нагрузки через блок Connection Port S.
Схема также содержит Solver Configuration блок, который требуется в любой модели Simscape. Он содержит параметры, относящиеся к числовым алгоритмам для симуляций Simscape.
Дважды кликните подсистему двигателя постоянного тока, чтобы открыть ее.
Подсистема двигателя постоянного тока
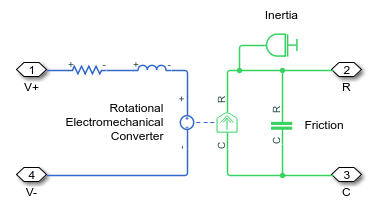
Двигатель состоит из электрической цепи и механической вращательной цепи, соединенной блоком Rotational Electromechanical Converter. Электрическая схема состоит из блока Resistor и блока Inductor. Он содержит два электрических порта, соответствующих V + и V - электрическим клеммам двигателя. Механическая схема содержит Rotational Friction блок, Inertia блок и два механических вращательных порта, C и R, соответствующих корпусу мотора и ротору, соответственно. Заметьте, как порты C и R блока Rotational Friction и блока Rotational Electromechanical Converter соединяются с портами C и R двигателя, чтобы сохранить правильное направление переменных в физической сети.
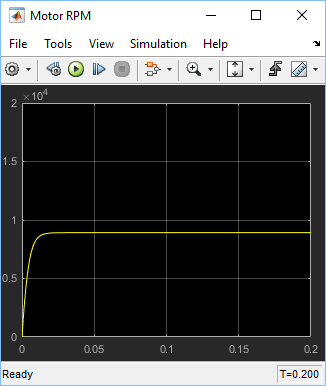
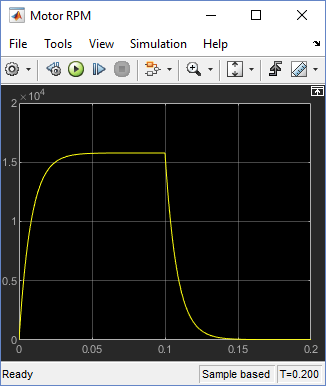
Дважды кликните возможности Motor RPM, чтобы открыть ее. Во время симуляции это окно отображает скорость вала как функцию времени.
Щелкните![]() , чтобы начать симуляцию. Решатель Simscape оценивает модель, вычисляет начальные условия и запускает симуляцию. Этот процесс может занять несколько секунд. Сообщение в левом нижнем углу окна модели предоставляет статус.
, чтобы начать симуляцию. Решатель Simscape оценивает модель, вычисляет начальные условия и запускает симуляцию. Этот процесс может занять несколько секунд. Сообщение в левом нижнем углу окна модели предоставляет статус.
Исследуйте результаты симуляции в окне Motor RPM scope.
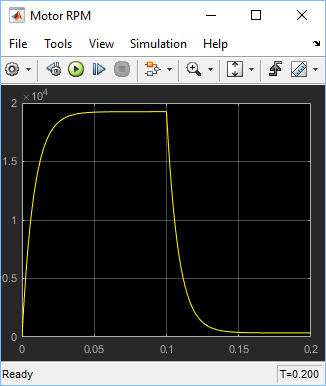
В течение первых 0,1 секунды двигатель не имеет внешней нагрузки, и скорость увеличивается до значения без нагрузки. Затем на 0,1 секунде крутящий момент остановки прикладывается как нагрузка к валу мотора. Изменение масштаба по возможностям оборотов мотора показывает, что модель соответствует параметрам производителя для скорости без нагрузки и крутящего момента остановки.
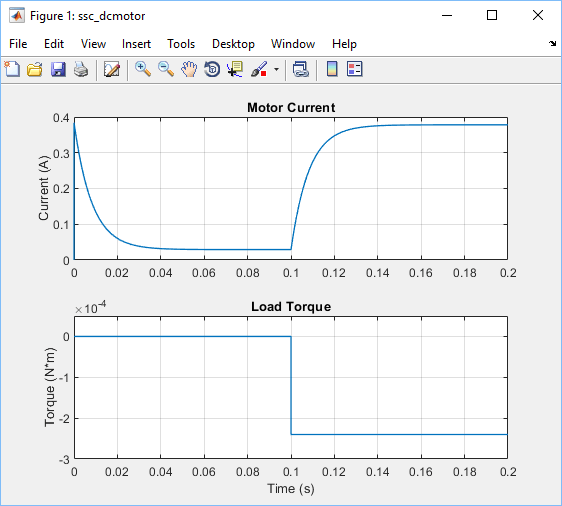
Пример модели также показывает, как можно использовать код MATLAB для анализа результатов симуляции. Чтобы построить график тока и крутящего момента нагрузки, нажмите Plot гиперссылка в аннотации модели. Ток, показанный на рисунке, соответствует параметрам производителя для тока без нагрузки.
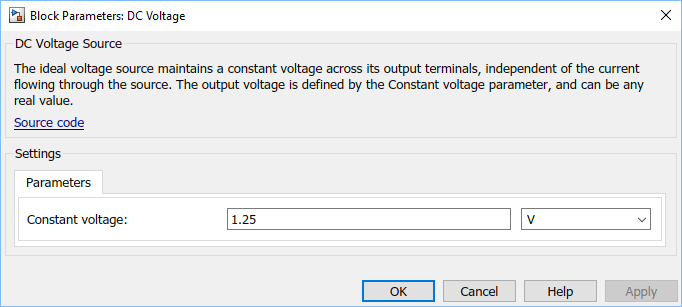
Уменьшите напряжение питания до 1,25 В (чтобы имитировать спад батареи) и измените крутящий момент нагрузки, чтобы найти максимальный крутящий момент при этом уменьшенном напряжении.
Дважды кликните DC Voltage Source блок. Установите Constant voltage значение 1.25 V.
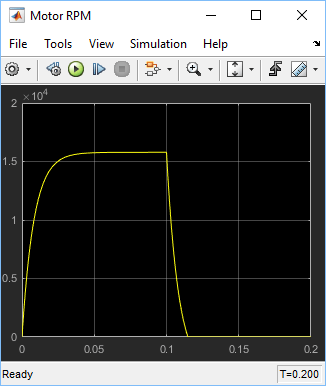
Запустите симуляцию. Обратите внимание на эффект пониженного напряжения на скорость без нагрузки.
Попробуйте изменить крутящий момент нагрузки, чтобы найти максимальный крутящий момент при этом уменьшенном напряжении. Откройте подсистему Step Input и дважды кликните Step исходный блок. Введите различные конечные значения для входного сигнала и повторите симуляцию.
Следующий рисунок показывает результаты симуляции для Final value, установленного на -0.2e-3, что соответствует (1.25/1.5)*0.24mNm, так как величина кривой крутящий момент-скорость пропорциональна напряжению для двигателя постоянного тока.
Замените источник крутящего момента простой механической нагрузкой, например, вентилятором, для которого крутящий момент определяется alpha*speed^2, где alpha является -1e-10 Nm/( рад/с) ^ 2.
Удалите подсистему Вход из модели.
В библиотеке Simscape блоков откройте Foundation Library > Mechanical > Mechanical Sensors.
Перетащите Ideal Rotational Motion Sensor блок в окно модели.
Откройте Foundation Library > Physical Signals > Functions.
Перетащите PS Product блок и PS Gain блок в окно модели.
Соедините блоки как показано на следующем рисунке. Чтобы повернуть блок, выберите его и нажмите Ctrl+R.
Дважды кликните блок PS Gain, чтобы открыть его диалоговое окно. В первом окне редактирования рядом с параметром Gain введите значение -1e-10. Во втором поле со списком модуля введите модуль выражение N*m/(rad/s)^2 и нажмите OK.
Запустите симуляцию и оцените эффективность двигателя с новой нагрузкой.