Вам может потребоваться предоставить производные по времени от некоторых входных сигналов, особенно если вы используете явный решатель. Один из способов предоставления необходимых входных производных - это фильтрация входов через lowpass. Входная фильтрация делает входной сигнал более гладким и обычно улучшает производительность модели. Дополнительным преимуществом является то, что механизм Simscape™ вычисляет производные по времени отфильтрованного входа. Фильтр первого порядка обеспечивает одну производную, в то время как фильтр второго порядка предоставляет первую и вторую производные. Если вы используете входную фильтрацию, очень важно выбрать соответствующее значение для временной константы фильтра.
Временная константа фильтра управляет фильтрацией входного сигнала. Отфильтрованный вход следует истинному входу, но сглаживается с задержкой в порядке выбранной временной константы. Установите постоянную времени на значение, не больше наименьшего временного интервала в системе, которая вас интересует. Если вы выбираете очень маленькую временную константу, отфильтрованный входной сигнал ближе к истинному входному сигналу. Однако этот фильтрованный входной сигнал увеличивает жесткость системы и замедляет симуляцию.
Вместо использования входной фильтрации можно предоставить производные по времени для входного сигнала непосредственно в качестве дополнительных физических сигналов.
Для кусочно-постоянных сигналов можно также явным образом задать нулевые входные производные.
Можно управлять способом предоставления производных по времени для каждого входного сигнала путем конфигурирования блока Simulink-PS Converter, соединенного с этим входным сигналом:
Откройте диалоговое окно Simulink-PS Converter блока.
Перейдите на вкладку Input Handling.
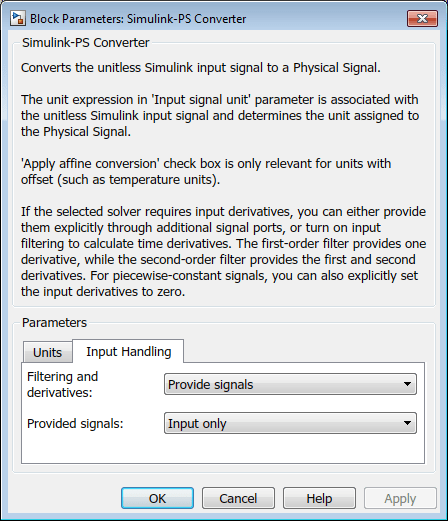
Когда вы добавляете новый блок Simulink-PS Converter к модели, опции обработки входных параметров по умолчанию Provide signals и Input only, и блок имеет один Simulink® входной порт и один выходной порт физического сигнала.
Чтобы включить входную фильтрацию, установите параметр Filtering and derivatives равным Filter input, derivatives calculated. Выберите фильтр первого или второго порядка с помощью параметра Input filtering order и установите соответствующее значение параметров Input filtering time constant (in seconds) для вашей модели.
Чтобы избежать фильтрации входного сигнала, сохраните параметр Filtering and derivatives следующим Provide signals. Затем установите Provided signals значения параметров:
Input and first derivative - Если вы выбираете эту опцию, на блоке Simulink-PS Converter появляется дополнительный входной порт Simulink, чтобы позволить вам соединить сигнал, обеспечивающий входную производную.
Input and first two derivatives - Если вы выбираете эту опцию, на блоке Simulink-PS Converter появляются два дополнительных входных порта Simulink, чтобы позволить вам соединить сигналы, обеспечивающие входные производные.
Наконец, если ваш входной сигнал кусочно-постоянен (такой как шаг), можно также явным образом задать нулевые производные входного сигнала, выбрав Zero derivatives (piecewise constant) значение для параметра Filtering and derivatives.
