Выполните преобразование из трехфазного (abc) сигнала во вращающуюся систему координат dq0 или обратный кадр
Simscape / Электрический / Специализированные Энергосистемы / Контроль


Блок abc to dq0 использует преобразование Park, чтобы преобразовать трехфазный (abc) сигнал в вращающуюся систему координат dq0. Угловое положение вращающейся системы координат определяется входом мас., в рад.
Блок dq0 to abc использует обратное преобразование Park, чтобы преобразовать вращающуюся систему координат dq0 в трехфазный (abc) сигнал. Угловое положение вращающейся системы координат определяется входом мас., в рад.
Когда вращающееся выравнивание системы координат при wt = 0 на 90 степени отстает от оси фазы A, сигнал положительной последовательности с Mag = 1 и Фазой = 0 степени приводит к следующим значениям dq: d = 1, q = 0.
Блок поддерживает два соглашения, используемые для преобразования Park:
Когда вращающаяся система координат выравнивается по оси A фазы при t = 0, то есть при t = 0, ось d выравнивается по оси a -. Этот тип преобразования Парка также известен как преобразование Парка на основе косинуса.
Когда вращающаяся система координат выровнена на 90 степени позади оси фазы A, то есть при t = 0, ось q выровнена по оси a -. Этот тип преобразования Парка также известен как синусоидальное преобразование Парка. Используйте это преобразование в Simscape™ Electrical™ моделях специализированных степеней с трехфазными синхронными и асинхронными машинами.
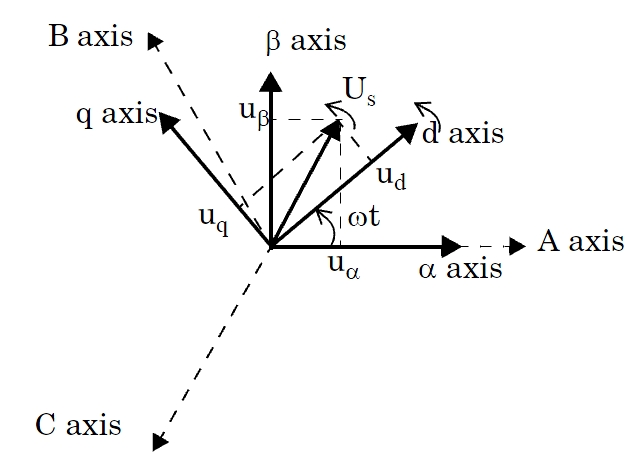
Выведите компоненты dq0 из abc-сигналов путем преобразования abc в Богослова в фиксированную опорную систему координат. Затем выполните преобразование α, 0 к dq0 во вращающейся системе координат, то есть выполнив вращение − (и t) на пространстве вектора Us = uα + j· uβ.
Преобразование abc-to-dq0 зависит от выравнивания системы координат при t = 0. Положение вращающейся системы координат дано ω.t, где ω представляет скорость вращения системы координат dq.
Когда вращающаяся система координат выровнена по оси A фазы, получаются следующие зависимости:
Обратное преобразование задается:
Когда вращающаяся система координат выровнена на 90 степени позади оси фазы A, получаются следующие зависимости:
Обратное преобразование задается:
The power_Transformations пример показывает различные способы использования блоков для выполнения преобразований Кларка и Парка.
