Динамика модели одной фазы асинхронной машины с ротором с обмоткой «беличья клетка»
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
Эта машина имеет две обмотки: основную и вспомогательную. С моделью Вы можете моделировать расщепленную фазу, конденсаторное начало, конденсаторный конденсатор начала управляемые, и главные & вспомогательные рабочие режимы обмоток.
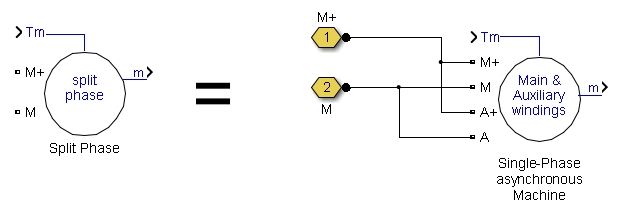
Для режима разделения фаз основная и вспомогательная обмотки соединены внутри следующим образом:
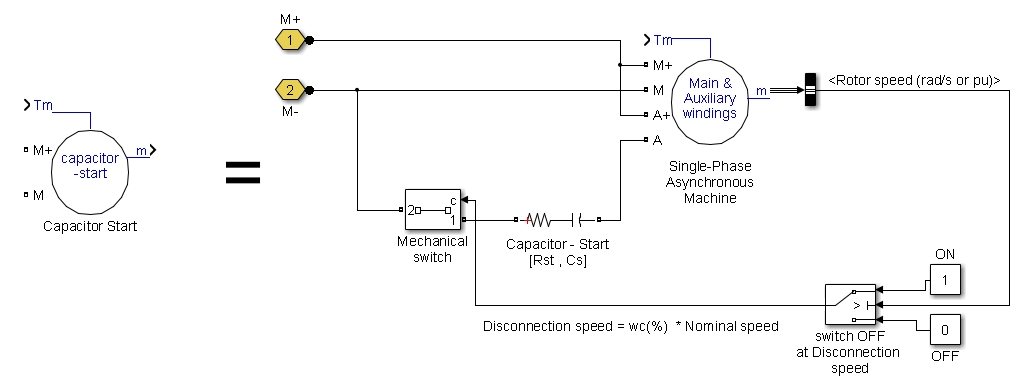
Для режима пуска конденсатора основная и вспомогательная обмотки внутренне соединены следующим образом:
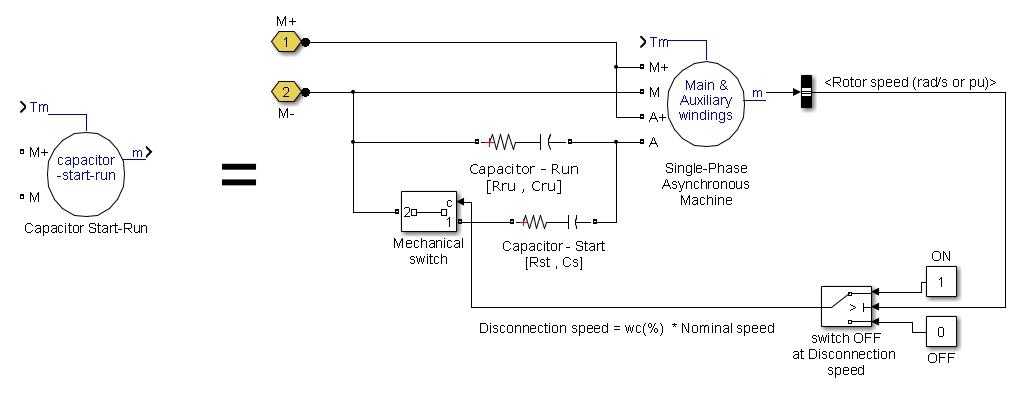
Для режима конденсатор-запуск-конденсатор-запуск, основная и вспомогательная обмотки внутренне соединены следующим образом:
Электрическая часть машины представлена моделью пространства состояний четвертого порядка, а механическая - системой второго порядка. Все электрические переменные и параметры относятся к статору, обозначенным следующими простыми знаками в уравнениях машины. Все величины статора и ротора находятся в исходной системе координат статора (dq-система координат). Индексы определены в следующей таблице.
Индекс | Определение |
|---|---|
d | d величина по оси |
q | q величина по оси |
r | Количество ротора основной обмотки |
R | Количество ротора вспомогательной обмотки |
s | Количество статора основной обмотки |
S | Количество статора вспомогательной обмотки |
l | Индуктивность утечек |
m | Индуктивность намагничивания |
| V qs = R s i qs + d φ qs/ dt | φ qs = L ss i qs + L мс i' qr | |
| V ds = R S i ds + d φ ds/ dt | φ ds = L SS i ds + L mS i' dr | |
| V' qr = R' r i' qr + d φ' qr/ dt - (N s/ N S) ω r φ' dr | φ' qr = L' r i' qr + L мс i qs | |
| V' dr = R' R i' dr + d φ' dr/ dt + (N S/ N s) ω r φ' qr | где | φ' dr = L' RR i' dr + L mS i ds |
| T e = p [(N S/ N s) φ' qr i' dr - (N s/ N S) φ' dr i' qr] | L ss = L ls + L ms | |
| L SS = L lS + L mS | ||
| L' rr = L' lr + L мс | ||
| L' RR = L' lR + L мС |
Система координат
Опорная система координат, зафиксированная в статоре, преобразует напряжения и токи в dq-систему координат.
Следующие отношения описывают преобразования системы координат ab-to-dq, примененные к одной фазе асинхронной машине.
Переменная f может представлять либо напряжение, либо токи, либо редактирование потока.
Одна фаза асинхронных параметров блоков машины заданы следующим образом (все величины относятся к статору).
Параметр | Определение |
|---|---|
Рс, Ллс | Сопротивление статора основной обмотки и индуктивность утечек |
RS, LlS | Сопротивление статора вспомогательной обмотки и индуктивность утечек |
R′r, L′lr | Сопротивление ротора основной обмотки и индуктивность утечек |
R′R, L′lR | Сопротивление ротора вспомогательной обмотки и индуктивность утечек. Эти два значения равны значениям сопротивления ротора обмотки и индуктивности утечек, соответственно. |
Lms | Индуктивность намагничивания основной обмотки |
LmS | Индуктивность намагничивания вспомогательной обмотки |
Lss, L′rr | Общая индуктивность статора и ротора основной обмотки |
LSS, L′RR | Общая индуктивность статора и ротора вспомогательной обмотки |
Вас, иас Vbs, ibs Vqs, iqs | Напряжение статора основной обмотки и ток Напряжение статора вспомогательной обмотки и ток q оси напряжение статора и ток |
V′qr, i′qr | q оси напряжение ротора и ток |
Vds, ids | d оси напряжение статора и ток |
V′dr, i′dr | d ось напряжение ротора и ток |
β qs, β d | Потоки статора q и d по оси |
ϕ′qr, ϕ′dr | Потоки ротора q и d по оси |
ωm | Скорость вращения ротора |
Θm | Угловое положение ротора |
p | Количество пар полюсов |
ωr | Электрическая скорость вращения ( |
Θr | Угловое положение электрического ротора ( |
Те | Электромагнитный крутящий момент |
TM | Механический крутящий момент на валу |
J F | Комбинированный ротор и коэффициент инерции нагрузки в (kg.m2). Установите значение бесконечности, чтобы симулировать заблокированный ротор. Комбинированный ротор и коэффициент вязкого трения нагрузки. |
H | Комбинированный ротор и постоянная инерция нагрузки в (ах). Установите значение бесконечности, чтобы симулировать заблокированный ротор. |
Не уточнено НЕ УТОЧНЕНО Rst Cs Rrun Crun | Количество эффективных поворотов основной обмотки. Количество эффективных поворотов вспомогательной обмотки. Сопротивление запуска конденсатора Конденсатор-Запуск Сопротивление вращения конденсатора Конденсатор-Run |
N | Отношение количества эффективных оборотов вспомогательной обмотки и количества эффективных поворотов основной обмотки. |
Можно выбрать между двумя типами модулей, чтобы задать электрические и механические параметры модели, диалоговое окно по модулям и диалоговое окно СИ. Оба блока моделируют одну и ту же машину. В зависимости от используемого диалогового окна, Simscape™ Electrical™ Specialized Степени Systems автоматически преобразует параметры, которые вы задаете, в параметры по модулю. Simulink® модель блока Single Phase Asynchronous Machine использует параметры модуля.
Выберите крутящий момент, приложенный к валу, в качестве входов Simulink блока или чтобы представлять вал машины с помощью вращающегося механического порта Simscape.
Выберите Torque Tm (по умолчанию), чтобы задать вход крутящего момента, в N.m или в pu, и изменить маркировку входного сигнала блока на Tm. Скорость машины определяется машиной Inertia J (или постоянной инерции H для машины pu) и различием между приложенным механическим крутящим моментом Tm и внутренним электромагнитным крутящим моментом Te. Знак для механического крутящего момента, когда скорость положительная, сигнал положительного крутящего момента указывает режим двигателя, и отрицательный сигнал указывает режим генератора.
Выберите Mechanical rotational port чтобы добавить к блоку механический вращательный порт Simscape, который позволяет соединять вал машины с другими блоками Simscape, которые имеют механические вращательные порты. Вход Simulink, представляющий механический крутящий момент Tm машины, затем удаляется из блока.
Следующий рисунок показывает, как соединить Идеальный Исходный блок Крутящего момента из библиотеки Simscape с валом машины, чтобы представлять машину в режиме двигателя или в режиме генератора, когда скорость ротора положительная.
Задайте диалоговое окно по модулям или диалоговое окно СИ. По умолчанию это SI.
Задайте один из четырех типов одиночных фаз асинхронных машин: Split Phase (по умолчанию), Capacitor-Start, Capacitor-Start-Run, или Main & auxiliary windings.
Когда этот флажок установлен, выходы измерения используют имена сигналов для идентификации меток шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигналов шины имели только алфавитно-цифровые символы.
Когда этот флажок снят (по умолчанию), выход измерения использует определение сигнала для идентификации меток шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Номинальная видимая степень Pn (VA), RMS Vn (V) и частота fn (Гц). По умолчанию это [ .25*746 110 60].
Сопротивление статора Rs (По или По) и индуктивность утечек Lls (По или По). По умолчанию это [2.02 7.4e-3] (СИ) и [0.031135 0.042999] (pu).
Сопротивление ротора Rr '(И или pu) и индуктивность утечек Ll' (Н или pu), относящиеся к статору. По умолчанию это [4.12 5.6e-3] (СИ) и [0.063502 0.03254] (pu).
Индуктивность намагничивания Lms (H или pu). По умолчанию это 0.1772 (СИ) и 1.0296 (pu).
Сопротивление статора RS (O или pu) и индуктивность утечек LlS (H или pu). Обратите внимание, что параметры ротора вспомогательной обмотки приняты равными значениям сопротивления ротора основной обмотки и индуктивности утечек. Поэтому указывать их в диалоговом окне не обязательно. По умолчанию это [7.14 8.5e-3] (СИ) и [0.11005 0.049391] (pu).
Для диалогового окна модулей СИ: комбинированная машина и коэффициент инерции нагрузки J (kg.m2), комбинированный коэффициент вязкого трения F (N.m.s), количество пар полюсов p и отношение количества эффективных оборотов вспомогательной обмотки и количество эффективных поворотов основной обмотки. pu units диалоговое окно: константа инерции H (s), комбинированный коэффициент вязкого трения F (pu) и количество пар полюсов p. По умолчанию [0.0146 0 2 1.18] (СИ) и [1.3907 0 2 1.18] (pu).
Начальная емкость Cs (farad или pu) и сопротивление последовательного конденсатора Rst ( По умолчанию это [2 254.7e-6] (СИ) и [0.030826 6.2297] (pu).
Емкость запуска Crun (farad или pu) и последовательное сопротивление Rrun (farad или pu). По умолчанию это [18 21.1e-6] (СИ) и [0.27744 0.51608] (pu).
Задает скорость (%) отключения вспомогательной обмотки. По умолчанию это 75.
Задает начальную скорость (%). По умолчанию это 0.
Задает шаг расчета, используемое блоком. Чтобы наследовать шаг расчета, заданное в блоке Powergui, установите этот параметр равным −1 (по умолчанию).
TmВход Simulink блока является механическим крутящим моментом на валу машины. Когда вы используете маску параметров СИ, вход является сигналом в N.m; в противном случае это в pu.
mВыход Simulink блока является вектором, содержащим сигналы измерения. Можно демультиплексировать эти сигналы с помощью блока Bus Selector, предоставленного в библиотеке Simulink. В зависимости от типа маски, которую вы используете, модули указаны в СИ или в pu.
Имя | Определение | Модули |
|---|---|---|
iar | Ток ротора ir_a | A или pu |
ibr | Ток ротора ir_b | A или pu |
iqr | Ток ротора iq | A или pu |
idr | Ток ротора, id | A или pu |
phiqr | Коэффициент потока phir_q | V.s или pu |
phidr | Коэффициент потока phir_d | V.s или pu |
МСФО | Основной обмотка тока статора ia | A или pu |
ibs | Ток статора вспомогательной обмотки ib | A или pu |
phiqs | phis_q потока статора (V.s) | V.s или pu |
phids | phis_d потока статора (V.s) | V.s или pu |
vc | Конденсатор напряжения Vc | V или pu |
w | Скорость ротора | рад/с |
Те | Электромагнитный крутящий момент Te | N.m или pu |
theta | Угол тетама ротора | рад |
Блок Single Phase Asynchronous Machine не включает представление потерь в железе и насыщения.
The power_singlephaseASM пример показывает использование блока Single Phase Asynchronous Machine в двух режимах работы.
[1] Krause, P.C., O. Wasynczuk, and S.D. Sudhoff, Анализ электрической техники, IEEE Press, 1995.
