Библиотека Electric Drives предназначена для инженеров из многих дисциплин, которые хотят легко и точно включать электроприводы в симуляцию своих систем. Интерфейс представляет параметры выбранного диска в топологии внешнего вида системы, таким образом упрощая корректировки, которые пользователи могут захотеть привести к значениям по умолчанию. Затем они могут бесшовно использовать любые другие тулбоксы или библиотеки, чтобы анализировать время или частотное поведение электропривода, взаимодействующего с его системой. Библиотека является наиболее полезной, когда мощный привод необходимо тщательно маневрировать, не игнорируя пределы работы нагрузки с одной стороны и источника степени с другой стороны. Хорошим примером является система электропривода гибридного автомобиля, которая может переключаться в миллисекундах от привода колес к подзарядке батарей, когда тормоза включены.
Инженеры и ученые могут легко работать с библиотекой. Библиотека имеет семь типичных приводов постоянного тока (DC), используемых в промышленности и транспортных системах, восемь приводов переменного тока (AC), обеспечивающих более эффективные и универсальные двигатели от тяговых устройств до устройств позиционирования, и модели вала и редуктора скорости, полезные для соединения с двигателем, модель нагрузки, сделанная из Simulink® блоки. Дополнительным значением библиотеки являются параметры, которые гарантируют валидность двигателя, преобразователей степени и системы управления. При разработке библиотеки особое внимание было уделено моделям электродвигателя путем сравнения поведения моделей с опубликованными данными крупных производителей. С библиотекой поставляются многочисленные примеры или тематические исследования типичных накопителей. Следует надеяться, что типичные пользовательские системы аналогичны этим анализируемым системам, что позволяет сэкономить время на создание практической системы и предоставление известной контрольной точки в анализе.
Для доступа к библиотеке Electric Drives откройте основную библиотеку Simscape™ Electrical™Specialized Power Systems. В MATLAB® в командной строке введите:
simscapepowersystems_ST
Электропривод является системой, которая выполняет преобразование электрической энергии в механическую энергию на регулируемых скоростях. Это причина, по которой электропривод также называется приводом с регулируемой скоростью (ASD). Кроме того, электропривод всегда содержит регулирование тока (или крутящего момента), чтобы обеспечить безопасное управление током для двигателя. Поэтому крутящий момент/скорость электропривода способен соответствовать в установившемся состоянии характеристикам крутящий момент/скорость любой механической нагрузки. Этот двигатель к механической нагрузке совпадает означает лучшую энергетическую эффективность и приводит к снижению затрат энергии. В сложение в переходный период ускорения и замедления электропривод обеспечивает быструю динамику и допускает мягкие пуски и остановки, для образца.
Растущее число применений требует, чтобы крутящий момент и скорость изменялись, чтобы соответствовать механической нагрузке. Электрические транспортные средства, лифты, приводы компьютерных дисков, инструментов машин и роботы являются примерами высокопроизводительных приложений, где требуемое движение в зависимости от временного профиля должно отслеживаться очень точно. Насосы, вентиляторы, конвейеры и ОВКВ являются примерами применения с умеренной эффективностью, где операция с переменной скоростью означает экономию энергии.
Электропривод состоит из следующих основных компонентов:
Электродвигатель
Силовой электронный преобразователь
Контроллер привода
Эта схема показывает основную топологию электропривода.
Базовая топология электропривода
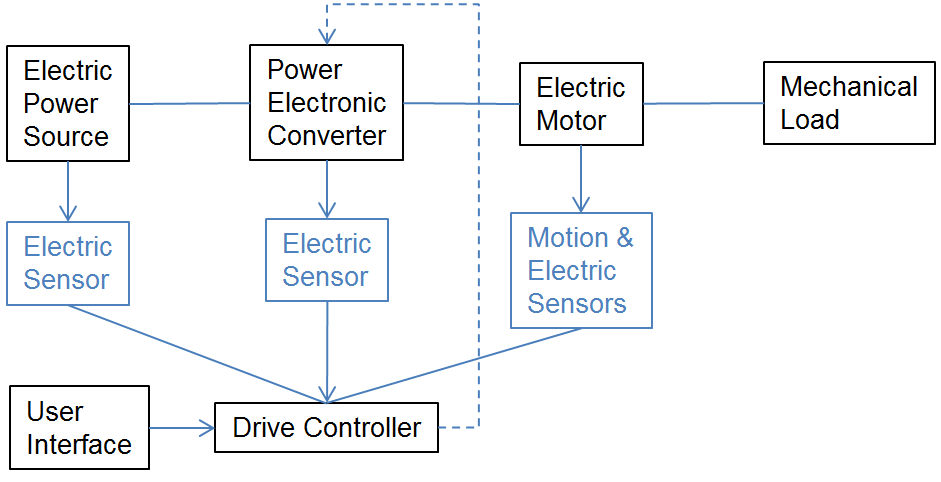
Двигатель, используемый в электроприводе, является или двигателем постоянного тока (DC) или двигателем переменного тока (AC). Тип используемого двигателя определяет классификацию электропривода в приводы с двигателем постоянного тока и приводы с электродвигателем переменного тока.
Электронный преобразователь степени производит переменную переменного напряжения и частоты от источника электрической степени. Существует много типов конвертеров в зависимости от типа электропривода. Приводы двигателя постоянного тока основаны на управляемых фазой выпрямителях (преобразователи переменного тока-постоянного тока) или на измельчителях (преобразователи постоянного тока-постоянного тока), в то время как приводы электродвигателя переменного тока используют инверторы (преобразователи постоянного тока-переменного тока) или циклонные преобразователи (преобразователи переменного тока). Основным компонентом всех силовых электронных преобразователей является электронный переключатель, который либо полуконтролируется (управляется on-state), как в случае тиристора, либо полностью управляется (управляется on-state и off-state), как в случаях IGBT (изолированный двухполюсный транзистор управления) и GTO (поворот управления ключами Управляемая функция электронного ключа - это то, что позволяет конвертеру создавать переменное напряжение переменного тока и частоту.
Цель контроллера привода состоит в том, чтобы преобразовать требуемый профиль крутящий момент/скорость привода в триггерные импульсы для электронного преобразователя степени, принимая во внимание различные переменные привода (токи, скорость и так далее), подаваемые назад датчиками. Для выполнения этого преобразования контроллер сначала основан на регуляторе тока (или крутящего момента). Регулятор тока является обязательным, потому что он защищает двигатель, точно управляя токами мотора. Заданные точки (SP) этого регулятора могут подаваться внешне, если привод находится в режиме регулирования крутящего момента, или внутренне регулятором скорости, если привод находится в режиме регулирования скорости. В библиотеке Electric Drives регулятор скорости работает последовательно с регулятором тока и основан на ПИ-контроллере, которая имеет три важные функции:
Скорость изменения SP ограничена таким образом, чтобы требуемая скорость постепенно распространялась на SP, порядок избежать внезапных переходов.
Выход регулятора скорости, являющийся SP для регулятора тока, ограничен максимальными и минимальными потолками.
Интегральный термин также ограничен в порядок, чтобы избежать ветра. Следующий рисунок показывает блоку схему скорости на основе ПИ- контроллер.
Регулятор скорости на основе ПИ-регулятора
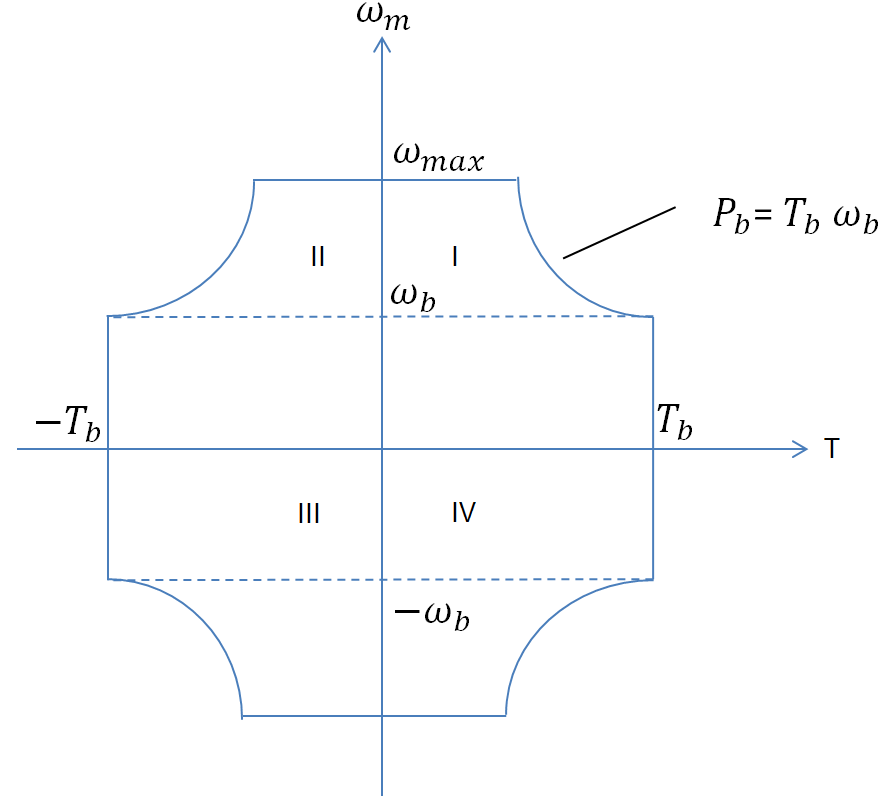
Для каждого электропривода механическая нагрузка, которая должна приводиться в действие, имеет определенный набор требований. Возможности крутящего момента/скорости электропривода могут быть представлены как график скорость/крутящий момент, состоящий из четырех квадрантов. В первом квадранте и электрический крутящий момент, и знаки скорости положительны, что указывает на передний двигатель, поскольку электрический крутящий момент находится в направлении движения. Во втором квадранте знак электрического крутящего момента отрицателен, а знак скорости положителен, что указывает на прямое торможение, поскольку электрический крутящий момент противоположен направлению движения. В третьем квадранте электрический крутящий момент и знаки скорости являются отрицательными, что указывает на реверс двигателя. В четвертом квадранте знак электрического крутящего момента положителен, а скорость отрицательна, что указывает на обратное торможение. Торможение привода осуществляется либо тормозным измельчителем (динамическое торможение), либо двунаправленной степенью (регенеративное торможение).
Эта схема иллюстрирует рабочую область электропривода с четырьмя квадрантами. У каждого сектора есть постоянная область крутящего момента от 0 до +/-номинальная скорость ω <reservedrangesplaceholder2> и область, где крутящий момент уменьшается обратно пропорционально со скоростью от ω <reservedrangesplaceholder1> до максимальной скорости ω <reservedrangesplaceholder0>. Эта вторая область является областью постоянной степени и получена путем уменьшения магнитного потока двигателя.
Четырехквадрантная операция электропривода
Библиотека Electric Drives допускает два уровня симуляции - детальные симуляции или симуляции среднего значения. Подробные симуляции используют блок Universal Bridge, чтобы представлять детальное поведение управляемых выпрямителем и инвертором приводов. Этот уровень симуляции требует небольших временных шагов симуляции, чтобы достичь правильного представления высокой частоты компонентов электрического сигнала приводов.
В симуляциях среднего значения используются модели среднего значения преобразователей степени. При симуляции в режиме среднего значения электрические входной и выходной токи и напряжения степеней, приводящих в действие электродвигатели, представляют средние значения реальных токов и напряжений. При этом компоненты высокой частоты не представлены, и в симуляциях могут использоваться гораздо большие временные шаги. Каждая модель среднего значения преобразователя степени описывается в документации для каждого типа модели постоянного или переменного тока. Временной шаг, используемый в приводе на уровне среднего значения, обычно может быть увеличен до наименьшего времени дискретизации контроллера, используемого в модели. Для примера, если привод использует временной шаг 20 мкс для токового цикла и временной шаг 100 мкс для цикла скорости, то временной шаг симуляции в режиме среднего значения может быть увеличен до 20 мкс. Инструкции по временному шагу симуляции приведены в документации для каждой модели.
