Управление постоянным током PI в дискретном времени с интегральной анти-обмоткой
Simscape/Электрический/Управление/Общее Управление Машиной
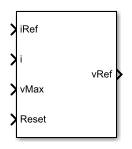
Блок DC Current Controller реализует дискретное время пропорционально-интегральный (PI) контроллер постоянного напряжения. Блок может реализовать нулевую отмену в пути с feedforward. Чтобы избежать насыщения интегральной составляющей, блок может реализовать анти-насыщение усиление.
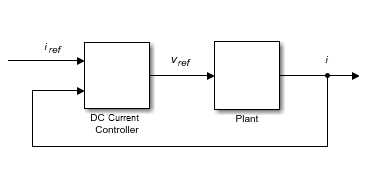
Уравнение, которое блок DC Current Controller использует для вычисления опорного напряжения,
где:
vref - эталонное напряжение.
Kp - пропорциональная составляющая.
Ki - интегральная составляющая.
Ts является шагом расчета.
iref - ссылочный ток.
i - измеренный ток.
Вычисление ПИ-регулятора приводит к нулю в передаточной функции с обратной связью. Чтобы отменить ноль, блок использует эту передаточную функцию аннулирования нуля в дискретном времени:
Чтобы избежать насыщения выхода интегратора, блок использует механизм защиты от обмотки тока. Коэффициент усиления интегратора тогда равен
где:
Kaw - коэффициент усиления анти-насыщения.
vref_sat является насыщенным сигналом опорного напряжения, который блок вычисляет как
где:
vref_unsat - ненасыщенный сигнал опорного напряжения.
vmin - нижний предел напряжения выхода. Только для положительного напряжения, . Для положительного и отрицательного напряжения,
vmax - верхний предел выхода напряжения.
DC Voltage Controller | DC-DC Voltage Controller | PWM Generator

