Электрические характеристики и развиваемая сила соленоида
Simscape/Электрический/Электромеханический/Мехатронный Приводы
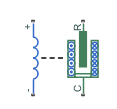
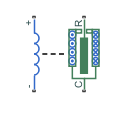
Блок Solenoid представляет электрические характеристики и развиваемую силу для соленоида на следующем рисунке:
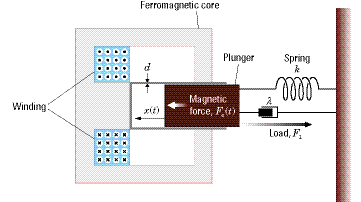
Пружина возврата опциональна. Чтобы удалить эффекты этой пружины из модели, установите параметр Spring constant равным 0.
Чтобы показать направление, в котором действует соленоид, значок блока изменяется динамически на основе значения параметра Motion direction under excitation.
| Когда параметр Motion direction under excitation установлен на... | Значок блока |
|---|---|
Port R moves away from port C
|
|
Port R moves towards port C
|
|
Уравнение движения плунжера как функции от положения, x, является:
где Fe - электромагнитная сила, F1 - сила нагрузки, Электромагнитная сила связана с соленоидным током и индуктивностью:
Индуктивность, которая получена в [1], может быть записана как:
где α и β - константы. Включение предыдущего уравнения в уравнение для электромагнитной силы дает зависимости сила-ход соленоида для тока i0:
Блок Solenoid решает для α и β, взяв две заданные силы и штрихи и подставив их в предыдущее уравнение. Он решает получившиеся уравнения для α и β.
Положительный ток от электрического + к портам - создает отрицательную силу (то есть тяговую силу) от механического C к портам R.
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы открыть тепловой порт, щелкните правой кнопкой мыши блок в модели, а затем из контекстного меню выберите Simscape > Block choices > Show thermal port. Это действие отображает тепловой порт, H на значке блока, и отображает параметры Temperature Dependence и Thermal Port.
Используйте тепловой порт, чтобы симулировать эффекты потерь сопротивления меди, которые преобразуют электрическую степень в тепло. Для получения дополнительной информации об использовании тепловых портов и о параметрах Temperature Dependence и Thermal Port, смотрите Симуляция Термальных эффектов в Вращательных и Поступательных Приводах.
Используйте Variables раздел блочного интерфейса, чтобы задать приоритет и начальные целевые значения для основных переменных до симуляции. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
Используйте переменную Position, X, чтобы задать цель начального положения плунжера в начале симуляции.
Примечание
Переменная Position, X является начальным воздушным зазором или штрихом соленоида, и поэтому должна быть больше или равной 0.
[1] С. Е. Лышевски. Электромеханические системы, электрические машины и прикладная мехатроника. CRC, 1999.