Поведенческая модель управляемого напряжением осциллятора
Simscape/Электрический/Интегральные схемы
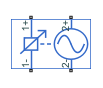
Блок Voltage-Controlled Oscillator обеспечивает поведенческую модель управляемого управляемым напряжением генератором (VCO). Напряжение выхода определяется следующими уравнениями:
где:
v in - это напряжение, приложенное к портам 1 + и 1 -.
v out - это напряжение на портах 2 + и 2 -.
f nom является частотой генератора, когда входное управляющее напряжение v nom.
F является линейной функцией v lim или функцией интерполяционной таблицы v lim.
A - пиковая амплитуда выходного напряжения.
t - время симуляции.
i out является выходным током.
R out является выходным сопротивлением.
Если вы выбираете Linear для параметра Frequency dependence on input voltage, тогда F функции задается:
где k - скорость изменения частоты с входным напряжением.
Если вы выбираете Tabulated для параметра Frequency dependence on input voltage, тогда F функции определяется векторами входа напряжений и соответствующих выходов отклонений частоты от номинальной, которую вы подаете. Значения для v min и v max являются первым и последним значениями входного вектора напряжения.
Можно смоделировать задержку между изменением входного управляющего напряжения и частотой генератора. Сделайте это путем моделирования динамики первого порядка между v lim и значением, переданным в F функции .

