| Идентификатор: Заголовок | cgsl_0201: Избыточные блоки Unit Delay и памяти | ||
|---|---|---|---|
| Описание | При подготовке модели к генерации кода, | ||
| A | Удалите резервные блоки Unit Delay и Memory. | ||
| Объяснение | A | Резервные блоки Unit Delay и Memory используют дополнительную глобальную память. Удаление избыточностей из модели уменьшает использование памяти, не влияя на поведение модели. | |
| Последнее изменение | R2013a | ||
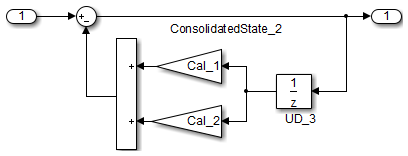
| Пример | Рекомендуемые: Задержки с объединением модулей
void Reduced(void)
{
ConsolidatedState_2 = Matrix_UD_Test - (Cal_1 * DWork.UD_3_DSTATE + Cal_2 *
DWork.UD_3_DSTATE);
DWork.UD_3_DSTATE = ConsolidatedState_2;
} | ||
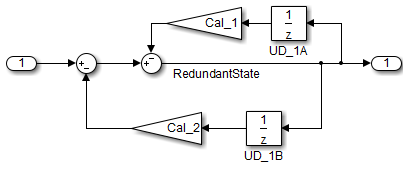
Не рекомендуемый: Задержки избыточных модулей
void Redundant(void)
{
RedundantState = (Matrix_UD_Test - Cal_2 * DWork.UD_1B_DSTATE) - Cal_1 *
DWork.UD_1A_DSTATE;
DWork.UD_1B_DSTATE = RedundantState;
DWork.UD_1A_DSTATE = RedundantState;
} | |||
Блоки Unit Delay и Memory проявляют коммутативные и распределительные алгебраические свойства. Когда блоки являются частью уравнения с одним ведущим сигналом, можно переместить блоки Unit Delay и Memory в новое положение уравнения, не меняя результат.
Для верхнего пути в предыдущем примере уравнения для блоков:
Для нижнего пути уравнения:
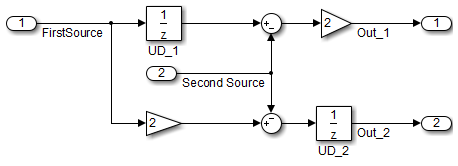
Напротив, если вы добавляете вторичный сигнал к уравнениям, расположение блока Unit Delay влияет на результат. Как показано в следующем примере, расположение блока Unit Delay влияет на результаты из-за наклона временной выборки между верхним и нижним путями.
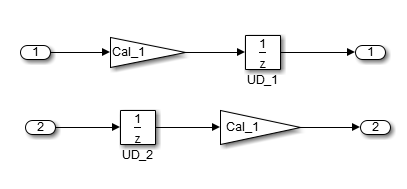
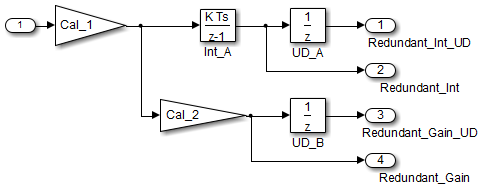
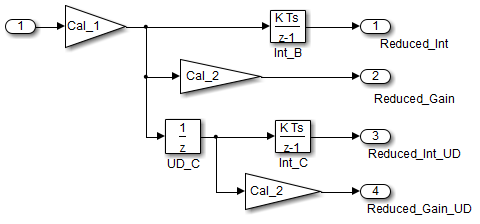
В случаях с одним источником и несколькими адресатами сравнение является более комплексным. Для примера в следующей модели можно переформулировать два блока Unit Delay в один модуль задержку.
С точки зрения черного ящика, две модели эквивалентны. Однако с точки зрения памяти и расчетов между этими двумя моделями существуют различия. {
real_T rtb_Gain4;
rtb_Gain4 = Cal_1 * Redundant;
Y.Redundant_Gain = Cal_2 * rtb_Gain4;
Y.Redundant_Int = DWork.Int_A;
Y.Redundant_Int_UD = DWork.UD_A;
Y.Redundant_Gain_UD = DWork.UD_B;
DWork.Int_A = 0.01 * rtb_Gain4 + DWork.Int_A;
DWork.UD_A = Y.Redundant_Int;
DWork.UD_B = Y.Redundant_Gain;
}{
real_T rtb_Gain1;
real_T rtb_UD_C;
rtb_Gain1 = Cal_1 * Reduced;
rtb_UD_C = DWork.UD_C;
Y.Reduced_Gain_UD = Cal_2 * DWork.UD_C;
Y.Reduced_Gain = Cal_2 * rtb_Gain1;
Y.Reduced_Int = DWork.Int_B;
Y.Reduced_Int_UD = DWork.Int_C;
DWork.UD_C = rtb_Gain1;
DWork.Int_B = 0.01 * rtb_Gain1 + DWork.Int_B;
DWork.Int_C = 0.01 * rtb_UD_C + DWork.Int_C;
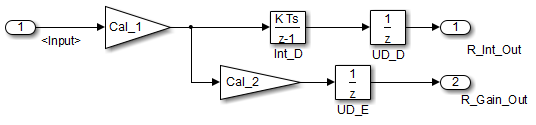
}В этом случае исходная модель более эффективна. В первом примере кода существуют три глобальные переменные, две из блоков Unit Delay (DWork.UD_A и DWork.UD_B) и одна из дискретного интегратора времени (DWork.Int_A). Второй пример кода показывает сокращение до одной глобальной переменной, сгенерированной модульными задержками (Dwork.UD_C), но существует две глобальные переменные из-за избыточных блоков Дискретное Время Integrator (DWork.Int_B и DWork.Int_C). Путь блока Дискретное Время Integrator вводит дополнительную локальную переменную (rtb_UD_C) и два дополнительных расчетов. Напротив, рефакторная модель (вторая) ниже более эффективна.
{
real_T rtb_Gain4_f:
real_T rtb_Int_D;
rtb_Gain4_f = Cal_1 * U.Input;
rtb_Int_D = DWork.Int_D;
Y.R_Int_Out = DWork.UD_D;
Y.R_Gain_Out = DWork.UD_E;
DWork.Int_D = 0.01 * rtb_Gain4_f + DWork.Int_D;
DWork.UD_D = rtb_Int_D;
DWork.UD_E = Cal_2 * rtb_Gain4_f;
}{
real_T rtb_UD_F;
rtb_UD_F = DWork.UD_F;
Y.Gain_Out = Cal_2 * DWork.UD_F;
Y.Int_Out = DWork.Int_E;
DWork.UD_F = Cal_1 * U.Input;
DWork.Int_E = 0.01 * rtb_UD_F + DWork.Int_E;
}Код для рефакторной модели более эффективен, потому что ветви от корневого сигнала не имеют избыточной единичной задержки. | |||