Ограниченный дифференциал как планетарная коническая передача
Блок силового агрегата/Привод/Блок последнего привода
Динамика автомобиля Blockset/Powertrain/Drivetrain/Final Drive Unit
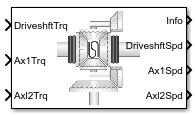
Блок Limited Slip Differential реализует дифференциал как планетарный конический train. Блок соответствует конической шестерне ведущего вала коронной (кольцевой) шестерне. Можно задать:
Отношение несущей частоты к валу привода
Расположение коронного колеса
Вязкий и коэффициенты демпфирования для осей и носителя
Тип скользящей муфты
Используйте блок в анализе привода уровня системы для расчета передачи степени от трансмиссии к колесам. Блок подходит для использования в рабочих процессах оборудования-в-цикле (HIL) и оптимизации. Все параметры настраиваются.
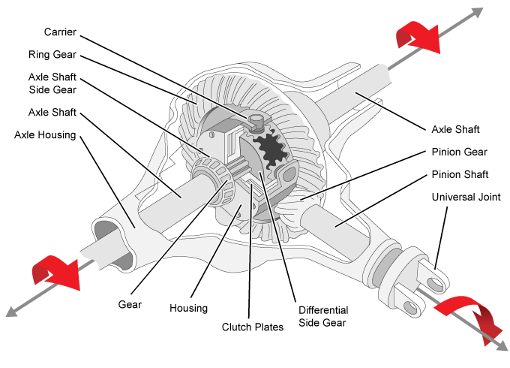
В дифференциале с ограниченным скольжением, чтобы предотвратить скольжение одного из колес, дифференциал разделяет крутящий момент, приложенный к левой и правой осям. При различном крутящем моменте, приложенном к осям, колеса могут перемещаться с различными скоростями вращения, предотвращая скольжение. Блок реализует три метода связи различных крутящих моментов, приложенных к осям:
Предварительно нагруженная идеальная муфта
Данные крутящего момента, зависящего от скольжения
Входные данные крутящего момента, зависящего от крутящего момента
Блок использует систему координат, которая производит положительное движение шины и транспортного средства для стандартных строений двигателя, трансмиссии и дифференциальных. Стрелы указывают на положительное движение.
Для расчета эффективности блока используйте параметр Efficiency factors. В этой таблице суммируется реализация блоков для каждой настройки.
| Настройка | Реализация |
|---|---|
| Постоянная эффективность, которую можно задать с помощью параметра Constant efficiency factor, eta. |
| Эффективность как функция входного крутящего момента базовой передачи, температуры воздуха и скорости привода. Используйте эти параметры для задания интерполяционной таблицы и точек по оси Х:
Для температуры воздуха можно либо:
Чтобы выбрать метод интерполяции, используйте параметр Interpolation method. Для получения дополнительной информации см. «Методы интерполяции». |
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Механическая степень от приводного вала | |
| Механическая степень от оси 1 | |||
| Механическая степень от оси 2 | |||
|
|
| Суммарные потери степени | ||
| Потеря степени из-за демпфирования | |||
| Потеря степени из-за сцепления | |||
|
|
| Изменение скорости сохраненной внутренней энергии | ||
Блок Limited Slip Differential реализует эти дифференциальные уравнения, чтобы представлять механическую динамическую характеристику для коронной передачи, левой оси и правой оси.
| Механическая динамическая характеристика | Дифференциальное уравнение |
|---|---|
| Коронная Передача |
|
| Левая ось |
|
| Правая ось |
|
Блок принимает жесткую связь между коронной шестерней и осями. Эти ограничительные уравнения применяются.
В уравнениях используются эти переменные.
| N | Передаточное отношение водила к приводу |
| Jd | Инерция вращения узла коронной передачи |
| bd | Линейно-вязкое демпфирование коронной передачи |
| ωd | Угловая скорость привода |
Скольжение по скорости | |
| J1 | Инерция вращения оси 1 |
| b1 | Линейно-вязкое демпфирование оси 1 |
| ω1 | Скорость оси 1 |
| J2 | Инерция вращения оси 2 |
| b2 | Линейно-вязкое демпфирование оси 2 |
| ω2 | Угловая скорость оси 2 |
| η | Эффективность |
| Td | Крутящий момент на валу привода |
| T1 | Крутящий момент оси 1 |
| T2 | Крутящий момент оси 2 |
| Ti | Крутящий момент внутреннего сопротивления оси |
| Ti1 | Крутящий момент внутреннего сопротивления оси 1 |
| Ti2 | Крутящий момент внутреннего сопротивления оси 2 |
| μ | Коэффициент трения |
Эффективный радиус сцепления | |
Внешний радиус кольцевого диска | |
| Ri | Внутренний радиус кольцевого диска |
| Fc | Сила сцепления |
| Tc | Крутящий момент муфты |
| μ | Коэффициент трения |
Блоки таблиц в Limited Slip Differential имеют следующие настройки параметров:
Interpolation method — Linear
Extrapolation method — Clip
Идеальная модель муфты сцепления использует скорость скольжения оси и трение, чтобы вычислить крутящий момент муфты. Коэффициент трения является функцией скольжения.
Радиусы диска определяют эффективный радиус муфты, над которым действует сила муфты.
Скорости вращения осей определяют скорость скольжения.
Чтобы вычислить крутящий момент сцепления, в модели муфты со скоростью скольжения используются данные о крутящем моменте, который является функцией скорости скольжения. Скорости вращения осей определяют скорость скольжения.
Чтобы вычислить крутящий момент муфты, модель входа муфты крутящего момента использует данные крутящего момента, который является функцией входа крутящего момента.
Блок Open Differential принимает жесткую связь между коронной шестерней и осями. Эти ограничительные уравнения применяются.
[1] Deur, J., Иванович, В., Хэнкок, М., and Assadian, F. «Modeling of Active Differential Dynamics». В процедурах ASME. Транспортные системы. Том 17, стр.: 427-436.
