Картографический двигатель и электроника привода, работающая в режиме управления крутящим моментом
Блоксет силовых агрегатов/Двигатели/Электродвигатели и инверторы
Динамика автомобиля Blockset/Powertrain/Propulsion
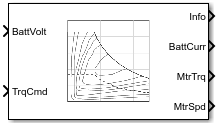
Блок Mapped Motor реализует отображенный двигатель и приводную электронику, работающую в режиме управления крутящим моментом. Выходной крутящий момент отслеживает ссылку крутящего момента и включает в себя постоянную времени отклика двигателя и отклика привода. Используйте блок для быстрых симуляций уровня системы, когда вы не знаете подробных параметров двигателя, например, для исследований мощности двигателя и компромисса крутящего момента. Блок принимает, что колебания скорости из-за механической нагрузки не влияют на отслеживание крутящего момента двигателя.
Можно задать:
Строение порта - Входной крутящий момент или скорость.
Электрический крутящий момент области значений - огибающая скорости крутящего момента или максимальная мощность и крутящий момент мотора.
Электрические потери - Одна рабочая точка, измеренная эффективность или измеренные потери. Если у вас есть основанные на модели Toolbox™ калибровки, можно виртуально калибровать измеренные таблицы потерь.
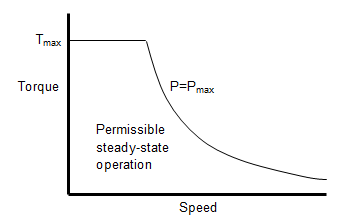
Чтобы задать область значений крутящего момента и скорости, которые позволяет блок, на вкладке Electrical Torque, для Parametrized by, выберите одну из этих опций.
| Настройка | Реализация блока |
|---|---|
Tabulated torque-speed envelope | Область значений, заданный как набор точек данных скорости и соответствующих значений максимального крутящего момента. |
Maximum torque and power | Область значений, заданный с максимальным крутящим моментом и максимальной степенью. |
Для любого метода блок реализует огибающую, подобную этому.
Чтобы задать электрические потери, на вкладке Electrical Losses, для Parameterize losses by, выберите одну из следующих опций.
| Настройка | Реализация блока |
|---|---|
Single efficiency measurement | Сумма этих членов, измеренная в одной точке измерения:
|
Tabulated loss data | Интерполяционная таблица потерь, которая является функцией скоростей двигателя и крутящих моментов нагрузки. Если у вас есть Model-Based Calibration Toolbox, щелкните Calibrate Maps, чтобы виртуально калибровать интерполяционные таблицы 2D с помощью измеренных данных. |
Tabulated loss data with temperature | Интерполяционная таблица потерь, которая является функцией скоростей двигателя, крутящих моментов нагрузки и рабочей температуры. Если у вас есть Model-Based Calibration Toolbox, щелкните Calibrate Maps, чтобы виртуально калибровать интерполяционные таблицы 3D с помощью измеренных данных. |
Tabulated efficiency data | 2D эффективность интерполяционную таблицу, которая является функцией скоростей и крутящих моментов нагрузки двигателя:
|
Tabulated efficiency data with temperature | 3D эффективность интерполяционную таблицу, которая является функцией скоростей, крутящих моментов нагрузки и рабочей температуры мотора:
|
Для наилучшей практики используйте Tabulated loss data вместо Tabulated efficiency data:
Эффективность становится плохо заданным для нулевой скорости или нулевого крутящего момента.
Вы можете принять во внимание фиксированные потери, которые все еще присутствуют для нулевой скорости или крутящего момента.
Примечание
Из-за потерь системы двигатель может потреблять ток, когда крутящий момент двигателя равен нулю.
Если у вас есть Model-Based Calibration Toolbox, можно виртуально калибровать интерполяционные таблицы измеренных потерь.
На вкладке Electrical Losses установите Parameterize losses by значение:
Tabulated loss data
Tabulated loss data with temperature
Нажмите Calibrate Maps.
Диалоговое окно проходит через эти задачи.
Задача | Описание | ||||||
|---|---|---|---|---|---|---|---|
Импорт данных о потерях | Импортируйте эти данные о потерях из файла. Для примера откройте Для получения дополнительной информации смотрите Использование данного (Model-Based Calibration Toolbox).
Сбор данных о двигателе в установившихся рабочих условиях. Данные должны охватывать частоту вращения, крутящий момент и температурную область значений. Чтобы фильтровать или редактировать данные, выберите Edit in Application. Откроется окно Model-Based Calibration Toolbox Data Editor. | ||||||
Сгенерируйте модели отклика | Model-Based Calibration Toolbox использует планы тестирования, чтобы подгонять данные к гауссовским моделям процесса (GPM). Чтобы оценить или настроить подгонку модели отклика, выберите Edit in Application. Откроется браузер модели на основе модели (Model-Based Calibration Toolbox Model Browser). Для получения дополнительной информации смотрите Оценку модели ( Model-Based Calibration Toolbox). | ||||||
Сгенерируйте калибровку | Model-Based Calibration Toolbox калибрует модели отклика и генерирует калиброванные таблицы. Чтобы оценить или настроить калибровку, выберите Edit in Application. Откроется браузер CAGE на основе модели (Model-Based Calibration Toolbox CAGE). Для получения дополнительной информации см. Раздел «Интерполяционные таблицы калибровки» (Model-Based Calibration Toolbox). | ||||||
Обновление параметров блоков | Обновите эти параметры с помощью калибровки.
|
Блок вычисляет ток батареи, используя механическую степень, потери степени и напряжение батареи. Положительный ток указывает на разряд батареи. Отрицательный ток указывает на заряд батареи.
В уравнении используются эти переменные.
| BattVolt | Напряжение батареи |
| MechPwr | Механическая степень |
| PwrLoss | Потеря степени |
| BattCurr | Ток батареи |
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая степень | Pmot | |
PwrBus | Электрическая степень | Pbus | |||
| PwrLoss | Степени мотора | Ploss | ||
| PwrStoredShft | Степень двигателя сохранена | Pstr | ||
В уравнениях используются эти переменные.
| Te | Крутящий момент на выходе валу мотора |
| ω | Скорость вала мотора |
J | Инерция двигателя |
Port configuration - Выбор строения портаTorque (по умолчанию) | SpeedВ этой таблице представлены строения портов.
| Строение порта | Создает порты |
|---|---|
| Форпост- |
| Входные |
Calibrate Maps - Калибровка таблиц с измеренными даннымиselectionЕсли у вас есть Model-Based Calibration Toolbox, можно виртуально калибровать интерполяционные таблицы измеренных потерь.
На вкладке Electrical Losses установите Parameterize losses by значение:
Tabulated loss data
Tabulated loss data with temperature
Нажмите Calibrate Maps.
Диалоговое окно проходит через эти задачи.
Задача | Описание | ||||||
|---|---|---|---|---|---|---|---|
Импорт данных о потерях | Импортируйте эти данные о потерях из файла. Для примера откройте Для получения дополнительной информации смотрите Использование данного (Model-Based Calibration Toolbox).
Сбор данных о двигателе в установившихся рабочих условиях. Данные должны охватывать частоту вращения, крутящий момент и температурную область значений. Чтобы фильтровать или редактировать данные, выберите Edit in Application. Откроется окно Model-Based Calibration Toolbox Data Editor. | ||||||
Сгенерируйте модели отклика | Model-Based Calibration Toolbox использует планы тестирования, чтобы подгонять данные к гауссовским моделям процесса (GPM). Чтобы оценить или настроить подгонку модели отклика, выберите Edit in Application. Откроется браузер модели на основе модели (Model-Based Calibration Toolbox Model Browser). Для получения дополнительной информации смотрите Оценку модели ( Model-Based Calibration Toolbox). | ||||||
Сгенерируйте калибровку | Model-Based Calibration Toolbox калибрует модели отклика и генерирует калиброванные таблицы. Чтобы оценить или настроить калибровку, выберите Edit in Application. Откроется браузер CAGE на основе модели (Model-Based Calibration Toolbox CAGE). Для получения дополнительной информации см. Раздел «Интерполяционные таблицы калибровки» (Model-Based Calibration Toolbox). | ||||||
Обновление параметров блоков | Обновите эти параметры с помощью калибровки.
|
Parameterized by - Выбор типаTabulated torque-speed envelope (по умолчанию) | Maximum torque and power| Настройка | Реализация блока |
|---|---|
Tabulated torque-speed envelope | Область значений, заданный как набор точек данных скорости и соответствующих значений максимального крутящего момента. |
Maximum torque and power | Область значений, заданный с максимальным крутящим моментом и максимальной степенью. |
Для любого метода блок реализует огибающую, подобную этому.
Vector of rotational speeds, w_t - Скорости вращения[0 375 750 800] (по умолчанию) | vectorСкорости вращения для допустимой установившейся операции, в рад/с. Чтобы избежать плохой эффективности из-за бесконечного наклона в кривой крутящий момент-скорость, задайте вектор скоростей вращения, который не содержит повторяющихся последовательных значений.
Чтобы создать этот параметр, для параметра Parameterized by выберите Tabulated torque-speed envelope.
Vector of maximum torque values, T_t - Крутящий момент[0.09 0.08 0.07 0] (по умолчанию) | vectorМаксимальные значения крутящего момента для допустимого установившегося состояния, в Н· м.
Чтобы создать этот параметр, для параметра Parameterized by выберите Tabulated torque-speed envelope.
Maximum torque, torque_max - Крутящий момент.1 (по умолчанию) | scalarМаксимальный допустимый крутящий момент двигателя, в Н· м.
Чтобы создать этот параметр, для параметра Parameterized by выберите Maximum torque and power.
Maximum power, power_max - Степень30 (по умолчанию) | scalarМаксимально допустимая степень двигателя, в W.
Чтобы создать этот параметр, для параметра Parameterized by выберите Maximum torque and power.
Torque control time constant, Tc - Постоянная времени0.02 (по умолчанию) | scalarПостоянная времени, с которой драйвер двигателя отслеживает крутящий момент, в с.
Parameterize losses by - Выбор типаSingle efficiency measurement (по умолчанию) | Tabulated loss data | Tabulated efficiency data| Настройка | Реализация блока |
|---|---|
Single efficiency measurement | Сумма этих членов, измеренная в одной точке измерения:
|
Tabulated loss data | Интерполяционная таблица потерь, которая является функцией скоростей двигателя и крутящих моментов нагрузки. Если у вас есть Model-Based Calibration Toolbox, щелкните Calibrate Maps, чтобы виртуально калибровать интерполяционные таблицы 2D с помощью измеренных данных. |
Tabulated loss data with temperature | Интерполяционная таблица потерь, которая является функцией скоростей двигателя, крутящих моментов нагрузки и рабочей температуры. Если у вас есть Model-Based Calibration Toolbox, щелкните Calibrate Maps, чтобы виртуально калибровать интерполяционные таблицы 3D с помощью измеренных данных. |
Tabulated efficiency data | 2D эффективность интерполяционную таблицу, которая является функцией скоростей и крутящих моментов нагрузки двигателя:
|
Tabulated efficiency data with temperature | 3D эффективность интерполяционную таблицу, которая является функцией скоростей, крутящих моментов нагрузки и рабочей температуры мотора:
|
Для наилучшей практики используйте Tabulated loss data вместо Tabulated efficiency data:
Эффективность становится плохо заданным для нулевой скорости или нулевого крутящего момента.
Вы можете принять во внимание фиксированные потери, которые все еще присутствуют для нулевой скорости или крутящего момента.
Примечание
Из-за потерь системы двигатель может потреблять ток, когда крутящий момент двигателя равен нулю.
Motor and drive overall efficiency, eff - Эффективность100 (по умолчанию) | scalarБлок определяет общую эффективность как:
В уравнении используются эти переменные.
| τ0 | Крутящий момент, при котором измеряется эффективность |
| ω0 | Скорость, с которой измеряется эффективность |
| P0 | Фиксированные потери независимо от крутящего момента или скорости |
Зависящие от крутящего момента электрические потери | |
| kw2 | Зависящие от скорости потери в железе |
При инициализации блок решает уравнение эффективности для k. Блок пренебрегает потерями, связанными с демпфированием ротора.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Single efficiency measurement.
Speed at which efficiency is measured, w_eff - Скорость375 (по умолчанию) | scalarСкорость, при которой измеряется эффективность, в рад/с.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Single efficiency measurement.
Torque at which efficiency is measured, T_eff - Крутящий момент0.08 (по умолчанию) | scalarКрутящий момент, при котором измеряется эффективность, в Н· м.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Single efficiency measurement.
Iron losses, Piron - Степень0 (по умолчанию) | scalarПотери в железе на скорости и крутящем моменте, при которых задана эффективность, в W.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Single efficiency measurement.
Fixed losses independent of torque and speed, Pbase - Степень0 (по умолчанию) | scalarФиксированные электрические потери, связанные с драйвером, когда ток и крутящий момент мотора равны нулю, в W.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Single efficiency measurement.
Vector of speeds (w) for tabulated losses, w_eff_bp - Точки останова[-8000 -4000 0 4000 8000] (по умолчанию) | 1-by- M векторТочки останова скорости для интерполяционной таблицы при вычислении потерь, в рад/с. Измерения массива 1 по количеству точек останова скорости, M.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите один из следующих:
Tabulated loss data
Tabulated loss data with temperature
Tabulated efficiency data
Tabulated efficiency data with temperature
Vector of torques (T) for tabulated losses, T_eff_bp - Точки останова[0 0.03 0.06 0.09] (по умолчанию) | 1-by- N векторТочки останова крутящего момента для интерполяционной таблицы при вычислении потерь, в Н· м. Измерения массива 1 по количеству точек останова крутящего момента, N.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите один из следующих:
Tabulated loss data
Tabulated loss data with temperature
Tabulated efficiency data
Tabulated efficiency data with temperature
Vector of temperatures for tabulated losses, Temp_eff_bp - Точки останова[233.15 293.15 373.15] (по умолчанию) | 1-by- L векторТочки прерывания температуры для интерполяционной таблицы при вычислении потерь, в K. Измерения массива 1 по количеству точек прерывания температуры, L.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите один из следующих:
Tabulated loss data with temperature
Tabulated efficiency data with temperature
Corresponding losses, losses_table - 2D интерполяционную таблицуM-by- N матрицаМассив значений электрических потерь как функции скорости и крутящего момента в W. Каждое значение определяет потери для определенной комбинации скорости и крутящего момента. Измерения массива должны совпадать со скоростью M, и крутящий момент, N, размерности вектора точек по оси Х.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Tabulated loss data.
Corresponding losses, losses_table_3d - 3D интерполяционную таблицуM-by- N-by- L массивМассив значений электрических потерь как функции скорости, крутящего момента и температуры в W. Каждое значение определяет потери для определенной комбинации скорости, крутящего момента и температуры. Измерения массива должны совпадать со скоростью M, крутящий момент, N, и температуры, L, размерности вектора точек по оси Х.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Tabulated loss data with temperature.
Corresponding efficiency, efficiency_table - 2D интерполяционную таблицуM-by- N матрицаМассив эффективность как функция скорости и крутящего момента, в%. Каждое значение определяет потери для определенной комбинации скорости и крутящего момента. Измерения массива должны совпадать со скоростью M, и крутящий момент, N, размерности вектора точек по оси Х.
Блок игнорирует значения эффективность для нулевой скорости или нулевого крутящего момента. Потери равны нулю, когда крутящий момент или скорость равны нулю. Блок использует линейную интерполяцию.
Чтобы получить желаемый уровень точности для более низких условий степени, можно предоставить табличные данные для низких скоростей и низких крутящих моментов.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Tabulated efficiency data.
Corresponding efficiency, efficiency_table_3d - 3D интерполяционную таблицуM-by- N-by- L массивМассив эффективность как функция скорости и крутящего момента, в%. Каждое значение определяет потери для определенной комбинации скорости и крутящего момента. Измерения массива должны совпадать со скоростью M, крутящий момент, N, и температуры, L, размерности вектора точек по оси Х.
Блок игнорирует значения эффективность для нулевой скорости или нулевого крутящего момента. Потери равны нулю, когда крутящий момент или скорость равны нулю. Блок использует линейную интерполяцию.
Чтобы получить желаемый уровень точности для более низких условий степени, можно предоставить табличные данные для низких скоростей и низких крутящих моментов.
Чтобы создать этот параметр, для параметра Parameterize losses by выберите Tabulated efficiency data.
Rotor inertia, J - Инерция5e-6 (по умолчанию) | scalarСопротивление ротора к изменению в движении мотора, в кг * м2. Значение может быть нулем.
Чтобы создать этот параметр, для параметра Port configuration выберите Torque.
Rotor damping, b - Демпфирование1e-5 (по умолчанию) | scalarДемпфирование ротора, в Н· м/( рад/с). Значение может быть нулем.
Чтобы создать этот параметр, для параметра Port configuration выберите Torque.
Initial rotor speed, omega_o - Скорость0 (по умолчанию) | scalarСкорость ротора в начале симуляции, в рад/с.
Чтобы создать этот параметр, для параметра Port configuration выберите Torque.
