В оборудовании обработка целой системы координат данных за один раз имеет высокую стоимость в памяти и области. Для экономии ресурсов последовательная обработка предпочтительна в HDL- проектов. Wireless HDL Toolbox™ работают на одной выборке за раз, а не на системе координат. Блоки принимают и возвращают данные как последовательный поток выборок и сигналов управления. Сигналы управления указывают на систему координат контуров. Протокол имитирует характеристики реальной системы, включая неактивные интервалы между выборками и системами координат.
Протокол управления использует начальный и конечный сигналы для демаркации каждой системы координат и действительный сигнал для указания, какие выборки обрабатывать. Протокол потоковой выборки Wireless HDL Toolbox позволяет вам конфигурировать количество циклов простоя между выборками и между системами координат. Циклы ожидания моделируют лопучий символ систем реального мира.
Этот протокол позволяет создавать системы координат разного размера, например, входить ли в систему runt или частичные системы координат из-за изменений синхронизации.
Блокам, которые используют этот интерфейс, не нужна опция строения для точного формата кадра или неактивных интервалов. В сложение, если вы изменяете время входных данных для своего проекта, вам не нужно обновлять каждый блок. Вместо этого обновите строение потока один раз на шаге сериализации. Некоторым блокам все еще требуется параметр максимального формата кадра для выделения ресурсов памяти.
При помощи потокового интерфейса выборки с управляющими сигналами каждый блок Wireless HDL Toolbox начинает вычислять на новом наборе выборок в сигнале начала кадра. Расчеты в новой системе координат происходят независимо от того, принимает ли блок конечный сигнал для предыдущей системы координат.
Протокол допускает незначительные ошибки синхронизации. Если количество допустимых и недопустимых циклов между начальным и конечным сигналами изменяется, блоки продолжают работать правильно. Этот протокол делает систему устойчивой к выполнению систем координат и изменениям синхронизации.
Блоки энкодера Wireless HDL Toolbox требуют минимального межкадрового интервала для вставки кодовых слов. Блоки турбодекодера и сверточного декодера требуют, чтобы предыдущая система координат был декодируема (утвердил сигнал конца системы координат) до прихода следующей системы координат. Блоки полярного, LPDC и RS энкодера и декодера обеспечивают сигнал, чтобы указать, когда блок готов принять начало новой системы координат.
Используйте блок Frame To Samples для преобразования данных с системой координат в поток выборок и сигналов управления, которые соответствуют этому протоколу. Управляющие сигналы сгруппированы в тип данных шины, называемый samplecontrol.
Блок Frame To Samples может сериализовать системы координат фиксированного размера. Если ваши системы координат варьируются в размере, используйте whdlFramesToSamples функция для преобразования обрамленных данных в векторы выборок и управляющих сигналов в MATLAB®. Затем импортируйте векторы в Simulink®. Используйте блок Sample Control Bus Creator для создания samplecontrol автобус в вашей модели.
Если ваши данные уже находятся в последовательном формате, разработайте свою собственную логику, чтобы сгенерировать эти сигналы управления от существующей схемы последовательного управления.
Блоки Wireless HDL Toolbox имеют вход и выходной порт, sample, для потоковых выборочных данных. Блоки захватывают по одной выборке за раз от входа и производят по одной выборке за раз для выхода. Выборки могут быть одним из этих поддерживаемых типов данных.
| Порт | Описание | Тип данных |
|---|---|---|
sample |
Скалярное целое значение, которое представляет одну выборку. Протокол также допускает вектор целочисленных значений, которые представляют одну выборку, например, для турбокодированных выборок. |
Поддерживаемые типы данных включают:
|
Блоки Wireless HDL Toolbox имеют вход и выходной порт, ctrl, для сигналов управления системой координат, относящихся к каждой выборке. Эти три сигнала управления указывают на валидность выборки и контуров системы координат. Порт управляющего сигнала является невиртуальным типом данных шины, называемым samplecontrol. Для получения дополнительной информации о типе данных шины смотрите Выборку шины управления.
Временная схема иллюстрирует протокол потоковой выборки. Он показывает входной кадр с шестью выборками и эквивалентную последовательность сигналов управления и данных.

Входной кадр ([1 2 3 4 5 6])'и сериализатор сконфигурирован для вставки циклов простоя вокруг допустимых выборок:
Один цикл холостого хода между выборками
Три цикла ожидания между системами координат
Одно значение, представляющее каждую выборку (выходной размер по умолчанию)
Можно задать эти параметры при помощи блока Frame To Samples или whdlFramesToSamples функция.
Сигналы управления start и end 1 для первых и последних допустимых выборок системы координат, соответственно. The valid сигнал равен 1 для каждой действительной входной выборки. The valid сигнал равен 0 для циклов ожидания, вставленных между выборками и между системами координат. Теперь система координат с шестью выборками представлена потоковой передачей данных в течение 15 циклов.
NR Polar Encoder, NR Polar Decoder, NR LDPC Encoder, NR LDPC Decoder, и RS Decoder блокирует, каждый обеспечивает выходной сигнал, чтобы указать, когда блок готов получить начало новой системы координат. Этот сигнал необходим, потому что эти блоки не могут принять новую систему координат на определенных этапах внутренних расчетов, и задержка этих каскадов может варьироваться со значениями входа портов.
| Порт | Описание | Тип данных |
|---|---|---|
| nextFrame | Логический скаляр, который указывает, когда блок может принять начало новой системы координат | Boolean |
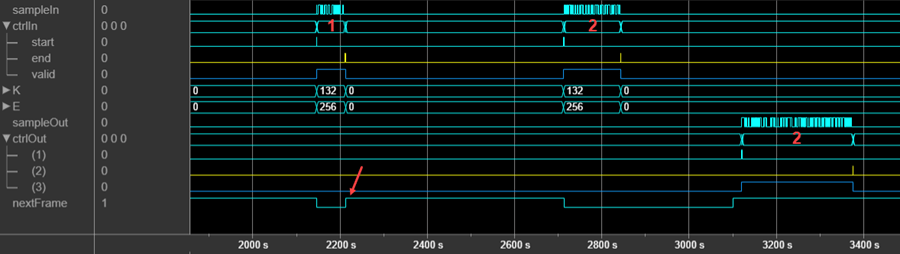
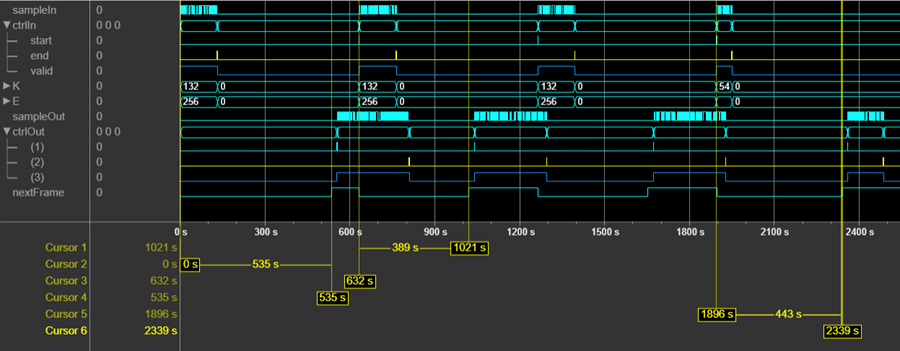
Эта форма волны показывает блок NR Polar Encoder, обрабатывающий несколько системы координат. Сигнал nextFrame выхода следующий 0 когда блок обрабатывает данные и 1 когда блок готов к приему запуска новой системы координат. Курсоры показывают задержку, изменяющуюся со значениями входного K и E значений порта. Для первой системы координат с заданными K и E значениями блок должен определить длину сообщения и отображение информационного бита для этих значений. Этот этап строения означает, что блоку нужно некоторое время, прежде чем он будет готов принять следующий входной кадр. Для последующих систем координат с теми же значениями для K и E, блок готов раньше, потому что ему не нужно пересчитывать строение.
Если блок получает сигнал входа start, пока nextFrame 0блок отбрасывает систему координат в прогресс и начинает обработку новых данных. Эта форма волны показывает NR Polar Encoder входной кадр (3), примененный, когда nextFrame 0. Блок отбрасывает систему координат в прогресс (2) и обрабатывает новую систему координат (3) как нормальный.
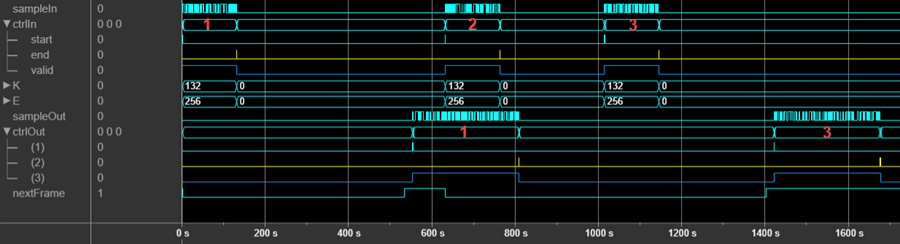
Если блок получает недопустимый входной кадр, например, если формат кадра не находится в поддерживаемой области значений, то блок устанавливает nextFrame на 1 один цикл после сигнала входа end. Это поведение указывает, что входной кадр отбрасывается. Эта форма волны показывает NR Polar Encoder входной кадр (1), который не имеет правильного количества выборок, ожидаемых для сопутствующих K и E значений. Форма волны показывает сигнал nextFrame, установленный на 1 сразу после входа end сигнал от системы координат 1. Блок отбрасывает систему координат в прогресс (1) и обрабатывает новую систему координат (2) как нормальный.