Транспортное средство 2D оси в прямом и противоположном движении
Powertrain Blockset / Динамика аппарата
Vehicle Dynamics Blockset / Кузов
Блок Vehicle Body 1DOF Longitudinal реализует одну степень свободы (1DOF) твердый кузов с постоянной массой, подвергающейся продольному (то есть, форвард, и инвертируйте), движение. Используйте блок:
В трансмиссии и исследования экономии топлива, чтобы представлять инерционное транспортное средство и перетащить загрузки, когда передача веса от вертикального и движений тангажа незначительна.
Определить крутящий момент механизма и степень, требуемую для транспортного средства следовать за заданным ездовым циклом.
Можно выбрать опции блока, чтобы создать входные порты для внешних сил, моменты, температура воздуха и скорость ветра.
| Блокируйте установку опции | External Input Ports | Описание |
|---|---|---|
External forces |
| Внешняя сила применилась к CG транспортного средства в зафиксированной транспортным средством системе координат. |
External moments |
| Внешний момент о CG транспортного средства в зафиксированной транспортным средством системе координат. |
Air temperature |
| Температура окружающего воздуха. Рассмотрите эту возможность, если вы хотите варьироваться температура во время времени выполнения. |
Wind X,Y,Z |
| Скорость ветра вдоль зафиксированного землей X-, Y-и осей Z. Если вы не выбираете эту опцию, блок реализует входной порт |
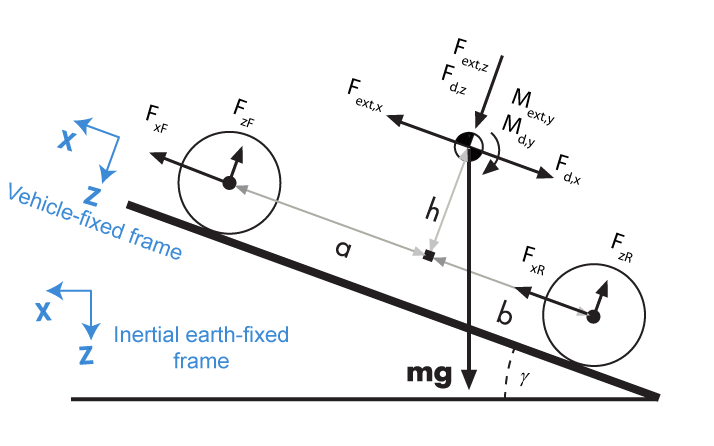
Оси транспортного средства параллельны и формируют плоскость. Продольное направление находится в этой плоскости и перпендикулярно осям. Если транспортное средство перемещается на наклоненном наклоне, нормальное направление не параллельно силе тяжести, но всегда перпендикулярно продольной осью плоскости.
Блок использует результирующий эффект всех сил и крутящих моментов, действующих на него, чтобы определить движение транспортного средства. Продольные силы шины продвигают транспортное средство или назад. Вес транспортного средства действует через его центр тяжести (CG). Угол класса изменяет направление разрешенной гравитационной силы, действующей на CG транспортного средства. Точно так же блок разрешает резистивную аэродинамическую силу сопротивления на CM транспортного средства.
Блок Vehicle Body 1DOF Longitudinal реализует эти уравнения.
Обнулите нормальное ускорение и обнулите крутящий момент тангажа, определяют нормальную силу на каждый передние и задние оси.
Колесо нормальные силы удовлетворяет этому уравнению.
Блок вычитает скорости ветра из скоростных компонентов транспортного средства, чтобы получить сетевую относительную скорость полета. Чтобы вычислить силу сопротивления и моменты, действуя на транспортное средство, блок использует сетевую относительную скорость полета.
По умолчанию, чтобы вычислить скорость ветра вдоль зафиксированной транспортным средством оси X, блок использует продольную скорость ветра вдоль зафиксированной землей Оси X. Если вы выбираете WindX,Y,Z, блок использует скорость ветра вдоль зафиксированного землей X-, Y-, осей Z.
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Внешне степень приложенной силы | |
| Продольное питание силы подано в передней оси | |||
| Продольное питание силы подано в задней оси | |||
|
|
| Степень силы сопротивления | ||
|
|
| Изменение уровня в гравитационной потенциальной энергии | ||
| Уровень в изменении продольной кинетической энергии | |||
Уравнения используют эти переменные.
| Fxf, Fxr | Продольные силы на каждом колесе в передней стороне и задней части основывают контактные точки, соответственно |
| Fzf, Fzr | Нормальные силы загрузки на каждом колесе в передней стороне и задней части основывают контактные точки, соответственно |
| FwF, FwR | Продольная сила на передних и задних осях вдоль зафиксированной транспортным средством оси X |
| FxExt, FwR | Внешняя сила вдоль зафиксированной транспортным средством оси X |
| Fd,x, Fd,z | Продольная и нормальная сила сопротивления на CG транспортного средства |
| Md,y | Закрутите должный тормозить транспортное средство о зафиксированной транспортным средством оси Y |
| Fd | Аэродинамическая сила сопротивления |
| Vx | Скорость транспортного средства. Когда Vx> 0, транспортное средство продвигается. Когда Vx <0, транспортное средство перемещается назад. |
| Nf, Nr | Количество колес на передней и задней оси, соответственно |
Угол дорожного класса | |
| m | Масса кузова |
| a, B | Расстояние передних и задних осей, соответственно, от нормальной точки проекции CG транспортного средства на общую плоскость оси |
| h | Высота CG транспортного средства выше плоскости оси |
| Cd | Лобный коэффициент аэродинамического сопротивления |
| Af | Лобная область |
| Pabs | Абсолютное давление |
| ρ | Массовая плотность воздуха |
| x, , | Транспортное средство продольное положение, скорость и ускорение вдоль зафиксированной транспортным средством оси X |
| wx | Скорость ветра вдоль зафиксированной транспортным средством оси X |
Транспортное средство вертикальная скорость вдоль зафиксированной транспортным средством оси z |
Блок Vehicle Body 1DOF Longitudinal позволяет вам только продольная динамика модели, параллельная земле и ориентированная вдоль направления движения. Транспортное средство принято, чтобы быть в тангаже и нормальном равновесии. Блок не моделирует тангаж или вертикальное перемещение. Чтобы смоделировать транспортное средство с тремя степенями свободы (DOF), используйте Vehicle Body 3DOF Longitudinal.
Vehicle Body 3DOF Longitudinal | Vehicle Body Total Road Load
