Выбор модели устраняет полюса, которые выходят за пределы определенного частотного диапазона интереса. Этот метод полезен, когда это необходимо, чтобы сфокусировать ваш анализ на конкретном подмножестве системной динамики. Например, если вы работаете с системой управления с полосой пропускания, ограниченной динамикой привода, вы можете отбросить динамику более высокой частоты на объекте. Устранение динамики вне частотного диапазона интереса уменьшает числовую сложность вычислений с моделью. Существует два способа вычислить модель уменьшаемого порядка выбором режима:
В командной строке, с помощью freqsep команда.
В Model Reducer, с помощью метода Mode Selection.
В Уменьшать задаче Порядка Модели в Live Editor, с помощью Mode Selection метод.
Для более общей информации о снижении сложности модели смотрите Основы Снижения сложности модели.
Model Reducer обеспечивает интерактивный инструмент для выполнения снижения сложности модели и исследования и сравнения ответов исходных моделей и моделей уменьшаемого порядка. Аппроксимировать модель выбором режима в Model Reducer:
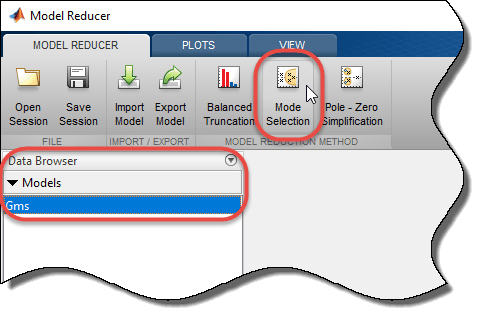
Откройте приложение и импортируйте модель LTI, чтобы уменьшать. Например, предположите, что существует модель под названием Gms в MATLAB® рабочая область. Следующая команда открывает Model Reducer и импортирует модель.
modelReducer(Gms)
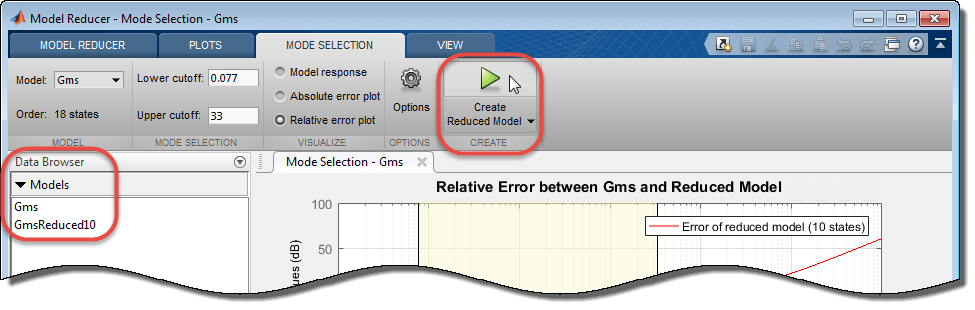
В Data Browser выберите модель, чтобы уменьшать. Нажмите![]() Mode Selection.
Mode Selection.
Во вкладке Mode Selection Model Reducer отображает график частотной характеристики исходной модели и уменьшаемой версии модели. Приложение также отображает нулевую полюсом карту обеих моделей.
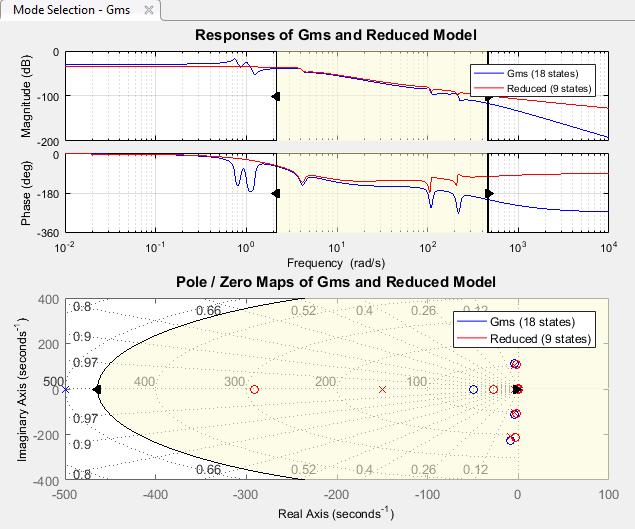
Нулевая полюсом карта отмечает местоположения полюса x и нулевые местоположения с o.
Примечание
Частотной характеристикой является Диаграмма Боде для моделей SISO и график сингулярного значения для моделей MIMO.
Model Reducer устраняет полюса, которые лежат за пределами теневой области. Измените теневую область, чтобы получить только динамику, которую вы хотите сохранить в упрощенной модели. Существует два способа сделать так.
Или на графике отклика или на нулевой полюсом карте, перетащите контуры теневой области или самой теневой области.
На вкладке Mode Selection введите более низкие и верхние частоты среза.
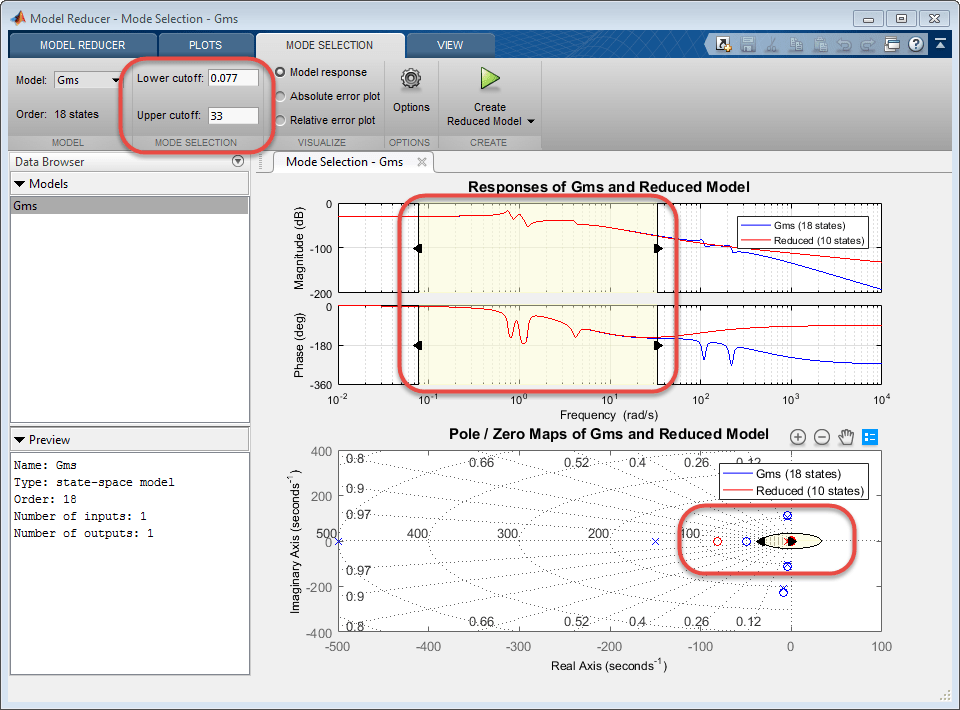
Когда вы изменяете теневые области или частоты среза, Model Reducer автоматически вычисляет новую модель уменьшаемого порядка. Все полюса, сохраненные в упрощенной модели, находятся в пределах теневой области на нулевой полюсом карте. Упрощенная модель может содержать нули, которые выходят за пределы теневой области.
Опционально, исследуйте абсолютную или относительную погрешность между исходной и упрощенной моделью. Выберите тип диаграммы погрешностей с помощью кнопок на вкладке Mode Selection.
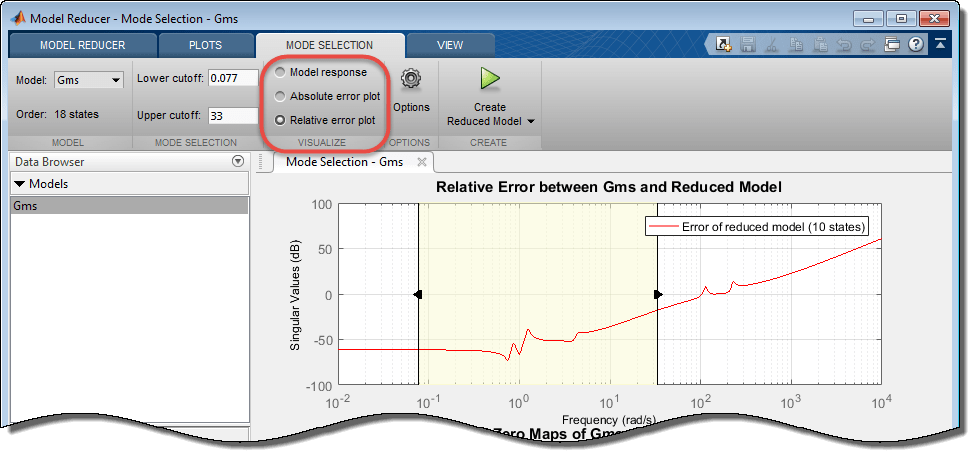
Для получения дополнительной информации об использовании графиков для анализа смотрите, Визуализируют Модели Уменьшаемого Порядка в Приложении Model Reducer.
Когда у вас есть одна или несколько упрощенных моделей, которые вы хотите сохранить и анализировать далее, кликнуть![]() . Новая модель появляется в Data Browser.
. Новая модель появляется в Data Browser.
После создания упрощенной модели в Data Browser можно продолжить настраивать область выбора режима, чтобы создать упрощенные модели с различными порядками для анализа и сравнения.
Можно теперь выполнить последующий анализ с упрощенной моделью. Например:
Исследуйте другие ответы уменьшаемой системы, такие как график Николса или переходной процесс. Для этого используйте инструменты на вкладке Plots. Смотрите Визуализируют Модели Уменьшаемого Порядка в Приложении Model Reducer для получения дополнительной информации.
Экспортируйте упрощенные модели в рабочее пространство MATLAB для последующего анализа или системы управления. На вкладке Model Reducer нажмите![]() Export.
Export.
Чтобы создать скрипт MATLAB, можно использовать для дальнейших задач снижения сложности модели в командной строке, нажать Create Reduced Model и выбрать Generate MATLAB Script.
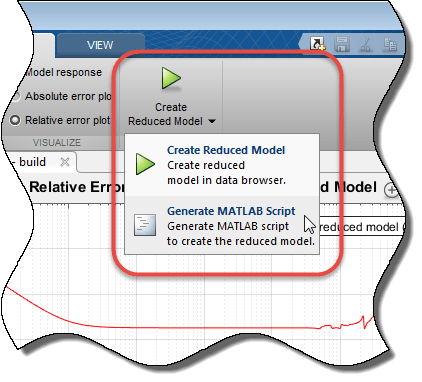
Model Reducer создает скрипт, который использует freqsep команда, чтобы выполнить снижение сложности модели параметрами вы установили на вкладке Mode Selection. Скрипт открывается в редакторе MATLAB.
Чтобы уменьшать порядок модели выбором режима в командной строке, используйте freqsep. Эта команда разделяет модель динамической системы на медленные и быстрые компоненты вокруг заданной частоты.
В данном примере загрузите модель Gms и исследуйте его частотную характеристику.
load modeselect Gms bodeplot(Gms)

Gms имеет два набора резонансов, один в относительно низкой частоте и другом на относительно высокой частоте. Предположим, что вы хотите настроить контроллер для Gms, но привод в вашей системе ограничивается полосой пропускания приблизительно 3 рад/с, промежуточных две группы резонансов. Упростить вычисление и настраивающий использование Gms, можно использовать выбор режима, чтобы устранить высокочастотную динамику.
[Gms_s,Gms_f] = freqsep(Gms,30);
freqsep анализирует Gms на медленные и быстрые компоненты, таким образом, что Gms = Gms_s + Gms_f. Все режимы (полюса) с собственной частотой меньше чем 30 находятся в Gms_s, и полюса более высокой частоты находятся в Gms_f.
bodeplot(Gms,Gms_s,Gms_f) legend('original','slow','fast')

Медленный компонент, Gms_s, содержит только резонансы более низкой частоты и совпадает с усилением DC исходной модели. Исследуйте порядки обеих моделей.
order(Gms)
ans = 18
order(Gms_s)
ans = 10
Когда высокочастотные движущие силы неважны для вашего приложения, можно использовать 10-й порядок Gms_s вместо исходной модели 18-го порядка. Если пренебрежение низкочастотной динамики подходит для вашего приложения, можно использовать Gms_f. Чтобы выбрать режимы, которые падают между низкочастотным и высокочастотным сокращением, используйте дополнительные вызовы freqsep.
