Освободите буфер входной кадр в последовательность скалярных выходных параметров
Управление сигнала / Буферы
dspbuff3
Блок Unbuffer освобождает буфер M i-by-N вход в 1- N выход. Таким образом, входные параметры освобождены буфер построчные так, чтобы каждая строка матрицы стала независимой выборкой времени в выходе. Уровень, на котором блок получает входные параметры, обычно меньше уровня, на котором блок производит выходные параметры.

Блок настраивает норму выработки так, чтобы период расчета был тем же самым в обоих ввод и вывод, Tso=Tsi. Поэтому выходной период расчета для входа формата кадра M i и период системы координат, Tfi является Tfi/Mi, который представляет уровень M в i разы выше, чем уровень входного кадра. В примере выше, блок получает входные параметры только один раз в три периода расчета, но производит выход один раз в период расчета. Чтобы повторно буферизовать входные параметры к большему или меньшему формату кадра, используйте блок Buffer.
В модели ниже, блок освобождает буфер вход с четырьмя каналами с форматом кадра три. Параметр Initial conditions обнуляется, и режим управления задачами установлен в многозадачность, таким образом, первые три выходных параметров являются нулевыми векторами.
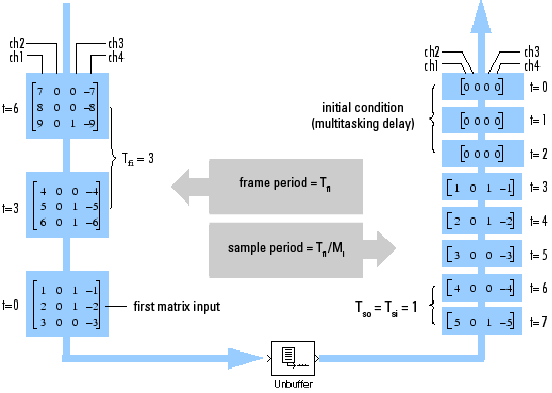
Блок Unbuffer имеет определяющую задачу для нуля задержку в Simulink® однозадачный режим. Определяющая задачу для нуля задержка означает, что первая входная выборка (полученный в t=0) появляется как первая выходная выборка.
Для многозадачной операции буфер блока Unbuffer инициализируется значением, заданным параметром Initial conditions, и блок начинает освобождать буфер эта система координат в начале симуляции. Входные параметры с блоком поэтому задерживаются одной длиной буфера или M i выборок.
Параметр Initial conditions может быть одним из следующего:
Скаляр, который будет повторен для первого M, i вывела выборки каждого канала
Вектор длины-Mi, содержащий значения первого M, i вывела выборки для каждого канала
M i-by-N матрица, содержащая значения первого M, i вывела выборки в каждом из каналов N
Примечание
Для получения дополнительной информации о задержке и режимах управления задачами Simulink, смотрите Избыточную Алгоритмическую Задержку (Определяющий задачу для Задержки) и Основанное на времени Планирование и Генерация кода (Simulink Coder).
Значение начального выхода блока для случаев ненулевой задержки. Можно задать скаляр, вектор или матрицу.
| Порт | Поддерживаемые типы данных |
|---|---|
Входной параметр |
|
Вывод |
|
| Buffer | DSP System Toolbox |
Смотрите Освобождают буфер Сигналы Системы координат в Демонстрационные Сигналы для сопутствующей информации.
