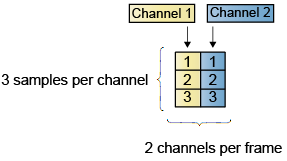
В основанной на системе координат обработке блоки обрабатывают данные одна система координат за один раз. Каждая система координат данных содержит последовательные выборки от независимого канала. Каждый канал представлен столбцом входного сигнала. Например, с основанной на системе координат точки зрения обработки, следующая 3-на-2 матрица имеет два канала, каждый из которых содержит три выборки.
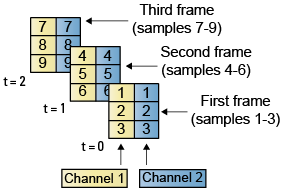
Когда вы конфигурируете блок, чтобы выполнить основанную на системе координат обработку, блок интерпретирует M-by-1 вектор как одноканальный сигнал, содержащий выборки M на систему координат. Точно так же блок интерпретирует M-by-N матрица как многоканальный сигнал с N независимые каналы и выборки M на канал. Например, в основанной на системе координат обработке, блоки интерпретируют следующую последовательность 3 2 матриц как двухканальный сигнал с форматом кадра 3.
Используя основанную на системе координат обработку выгодно для многих приложений обработки сигналов, потому что можно обработать несколько выборок целиком. Путем буферизации данных в системы координат и обработки мультидемонстрационных кадров данных, можно часто улучшать вычислительное время алгоритмов обработки сигналов. Чтобы выполнить основанную на системе координат обработку, у вас должна быть лицензия DSP System Toolbox™.
Для получения дополнительной информации о недавних изменениях в основанной на системе координат обработке, смотрите, что Основанное на системе координат обрабатывает раздел изменений DSP System Toolbox Информация о релизах.
Эта страница обсуждает сигналы создания для основанной на системе координат обработки с помощью блока Sine Wave и блока Signal From Workspace. Обратите внимание на то, что блок, получающий этот сигнал, реализует основанную на выборке обработку или основанную на системе координат обработку на сигнале на основе набора параметров в диалоговом окне блока.
Создайте новый Simulink® модель.
От библиотеки Sources перетащите блок Sine Wave в модель.
От библиотеки Matrix Operations перетащите блок Matrix Sum в модель.
От библиотеки Simulink Sinks перетащите блок To Workspace в модель.
Соедините блоки в порядке, в котором вы добавили их в свою модель.
Дважды кликните блок Sine Wave и установите параметры блоков можно следующим образом:
Amplitude = [1 3 2]
Frequency = [100 250 500]
Sample time = 1/5000
Samples per frame = 64
На основе этих параметров, блок Sine Wave выходные параметры три синусоиды с амплитудами 1, 3, и 2 и частоты 100, 250, и 500 Гц, соответственно. Период расчета, 1/5000, является 10 раз самой высокой частотой синусоиды, которая удовлетворяет критерию Найквиста. Формат кадра 64 для всех синусоид, и, поэтому, выход имеет 64 строки.
Сохраните эти параметры и закройте диалоговое окно путем нажатия на OK.
Вы теперь успешно создали сигнал с тремя каналами с 64 выборки на каждую систему координат, с помощью блока Sine Wave. Остальная часть этой процедуры описывает, как добавить эти три синусоиды вместе.
Дважды кликните блок Matrix Sum. Установите параметр Sum over на Specified dimension, и установленный параметр Dimension на 2. Нажмите OK.
Во вкладке Debug панели инструментов модели выберите Information Overlays> Signal Dimensions.
Запустите модель.
Ваша модель должна теперь выглядеть похожей на следующую фигуру. Можно также открыть модель путем ввода ex_usingsinwaveblkfb в MATLAB® командная строка.
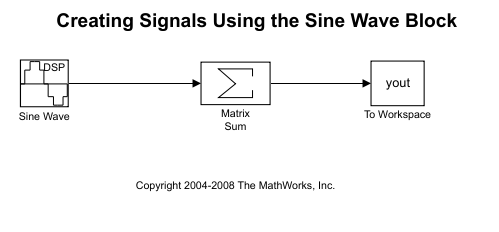
Три сигнала суммированы детально блоком Matrix Sum. Затем они экспортируются в рабочее пространство MATLAB.
В командной строке MATLAB введите plot(yout(1:100)).
Ваш график должен выглядеть похожим на следующую фигуру.
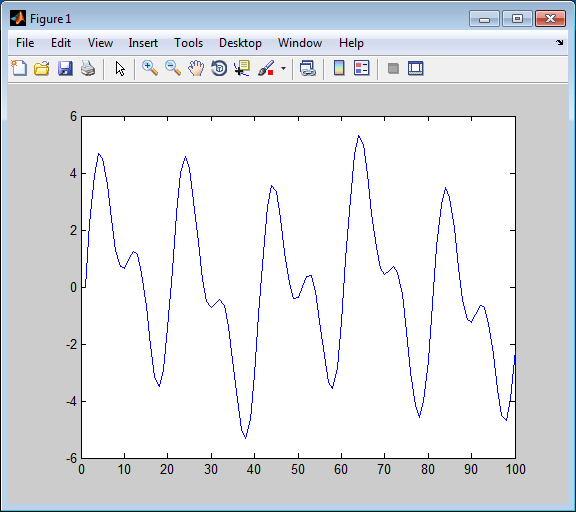
Этот рисунок представляет фрагмент суммы этих трех синусоид. Вы теперь добавили каналы сигнала с тремя каналами вместе и отобразили результаты в окне рисунка.
Основанная на системе координат обработка может значительно улучшать производительность вашей модели путем уменьшения количества времени, которое это берет симуляцию, чтобы запустить. Эта тема описывает, как создать двухканальный сигнал с периодом расчета 1 секунды, периодом системы координат 4 секунд и форматом кадра 4 выборок с помощью блока Signal From Workspace.
Создайте новую модель Simulink.
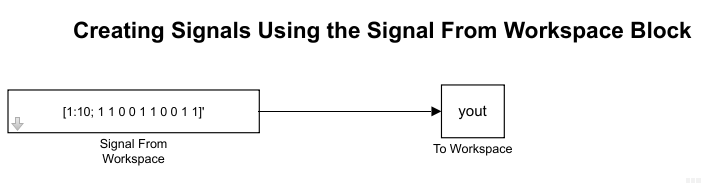
От библиотеки Sources перетащите блок Signal From Workspace в модель.
От библиотеки Simulink Sinks перетащите блок To Workspace в модель.
Соедините два блока.
Дважды кликните блок Signal From Workspace и установите параметры блоков можно следующим образом.
Signal = [1:10; 1 1 0 0 1 1 0 0 1 1]'
Sample time = 1
Samples per frame = 4
Form output after final data value by = Setting to zero
На основе этих параметров блок Signal From Workspace выводит двухканальный сигнал с периодом расчета 1 секунды, периодом системы координат 4 секунд и форматом кадра четырех выборок. После того, как блок выводит сигнал, все последующие выходные параметры имеют значение нуля. Два канала содержат следующие значения:
Канал 1: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 0, 0...
Канал 2: 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0...
Сохраните эти параметры и закройте диалоговое окно путем нажатия на OK.
Во вкладке Debug панели инструментов модели выберите Information Overlays> Signal Dimensions.
Запустите модель.
Следующая фигура является графическим представлением поведения модели в процессе моделирования. Можно также открыть модель путем ввода ex_usingsfwblkfb в командной строке MATLAB.
В командной строке MATLAB введите yout.
Следующим является вывод, отображенный в командной строке MATLAB.
yout =
1 1
2 1
3 0
4 0
5 1
6 1
7 0
8 0
9 1
10 1
0 0
0 0
Обратите внимание на то, что нули были добавлены в конец каждого канала. Вы теперь успешно создали двухканальный сигнал и экспортировали его в рабочее пространство MATLAB.
