Используйте Embedded Coder® продукт, чтобы сгенерировать код C or C++, который оптимизирован для развертывания на платах быстрого прототипирования, встраиваемых процессорах или микропроцессорах. Если вы плохо знакомы с Embedded Coder, или ваши требования индивидуальной настройки кода приложения минимальны, можно использовать графические инструменты и параметры конфигурации кода по умолчанию, чтобы быстро сгенерировать код производственного качества. Если необходимо произвести настроенный код для интеграции с существующим внешним кодом, или вы хотите выполнить инструкциям кода и стандартам, инструменты доступны, чтобы сконфигурировать генератор кода, чтобы удовлетворить требования для взаимодействия через интерфейс, внешнего вида кода, упаковки и оптимизации.
Генерация и рассмотрение кода для развертывания на встраиваемой системе могут быть столь же простыми как подготовка модели для генерации кода с инструментом Quick Start. Затем с инструментами кода, доступными из Редактора Simulink, можно сконфигурировать интерфейсы кода, инициировать генерацию кода и рассмотреть сгенерированный код.
Чтобы завершить этот пример, вы должны иметь:
MATLAB®
MATLAB Coder™
Simulink®
Simulink Coder
Embedded Coder
Пример использует модели rtwdemo_roll в качестве примера и rtwdemo_roll_harness. Модели были проверены для симуляции.
Открытая модель rtwdemo_roll.
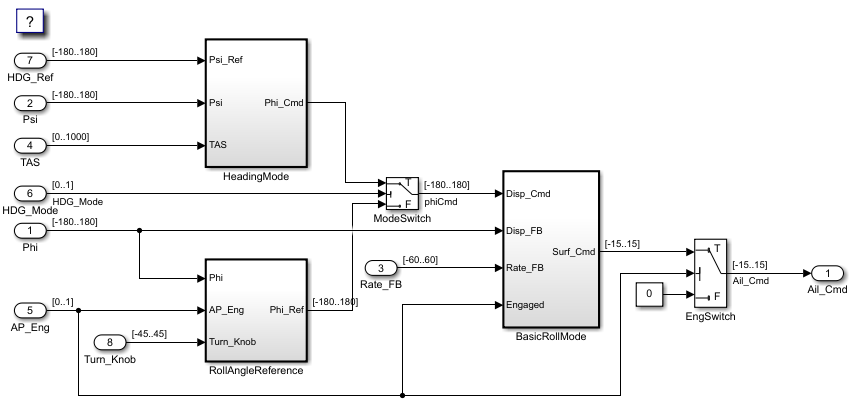
Эта модель реализует основной алгоритм автопилота продольной оси, который управляет положением элерона самолета.
Модель представляет один компонент в большей системе управления самолетом. Через HDG_Mode сигнал, система управления помещает модель в один из двух рабочих режимов: прокрутитесь отношение содержат, или заголовок содержат. RollAngleReference и HeadingMode подсистемы вычисляют заданное значение отношения крена, которое поддерживает один из рабочих режимов. Затем BasicRollMode подсистема, ПИД-регулятор, вычисляет команду положения элерона на основе заданного значения и на обратной связи, которая указывает на измеренное отношение крена и скорость изменения. Модель спроектирована, чтобы действовать на уровне 40 Гц.
Пример использует модель rtwdemo_roll_harness протестировать rtwdemo_roll.
Вы будете учиться как:
Сгенерируйте код при помощи инструмента Embedded Coder Quick Start.
Сконфигурируйте интерфейс данных.
Сконфигурируйте параметр модели как глобальную переменную для настройки в течение времени выполнения.
Сравните симуляцию модели и результаты сгенерированного кода для числовой эквивалентности.
Разверните сгенерированный код.
Чтобы запустить пример, смотрите, Генерируют Код при помощи Быстрого запуска Embedded Coder.
