В этом разделе описываются методы блока управления приводом разомкнутого контура и замкнутого цикла.
Регулирование без обратной связи (также известный как скалярное управление или управление Вольтами/Гц) является популярным методом блока управления приводом, который можно использовать, чтобы запустить любой электродвигатель переменного тока. Это - простой метод, для которого не нужна никакая обратная связь от двигателя. Чтобы сохранить магнитный поток статора постоянным, мы сохраняем амплитуду напряжения питания пропорциональной ее частоте.
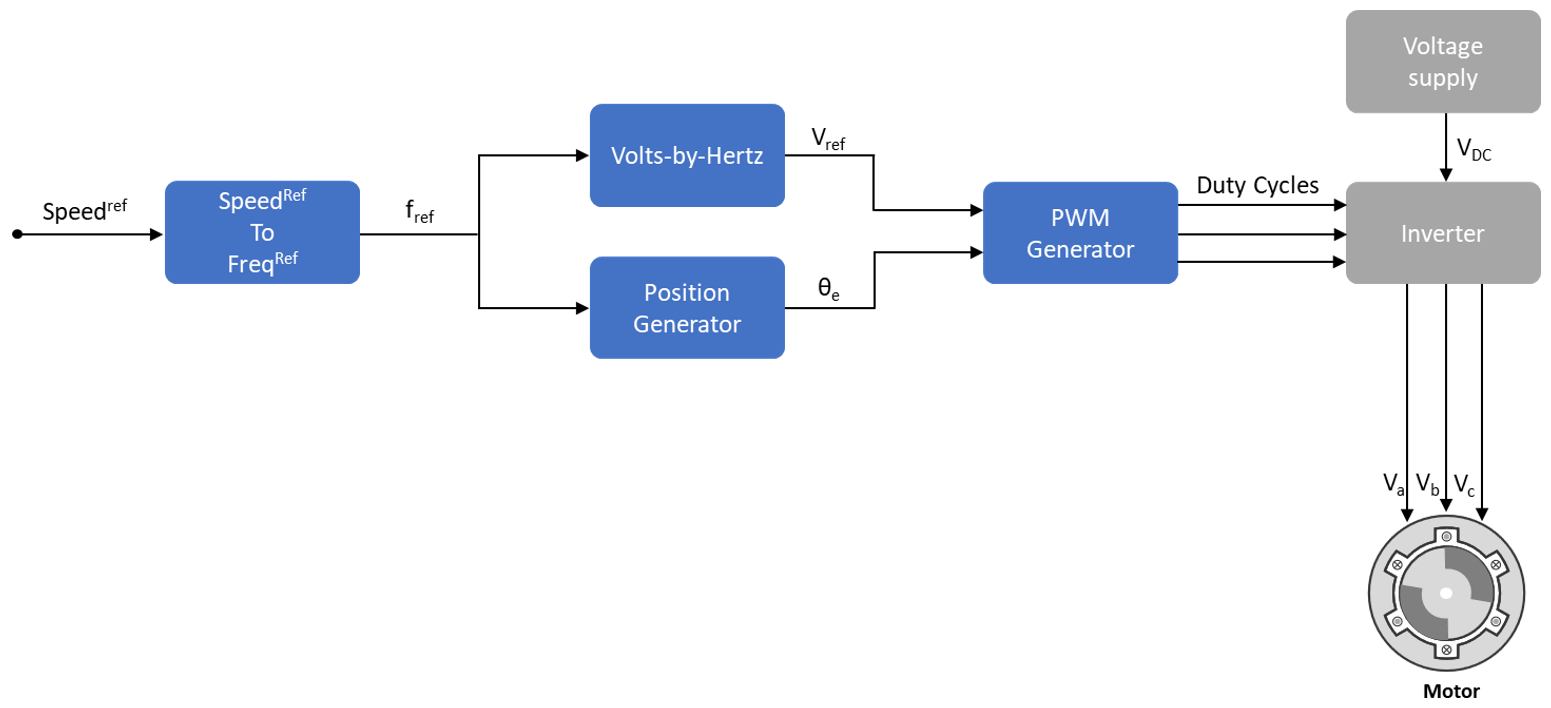
Этот рисунок показывает систему регулирования без обратной связи. Силовая цепь состоит из напряжения PWM питаемый инвертор, предоставленный источником постоянного тока. Система не использует сигнала обратной связи для реализации управления. Это использует задающую скорость, чтобы определить частоту напряжений статора. Система вычисляет величину напряжения, столь же пропорциональную отношению номинального напряжения и оцененной частоты (обычно известный как отношение Вольт/Гц), так, чтобы поток остался постоянным.
где:
расчетный поток двигателя в Wb.
напряжение статора электродвигателя переменного тока в Вольтах.
частота напряжения статора электродвигателя переменного тока в Гц.
В системе разомкнутого контура скорость для электродвигателя переменного тока описывается как:
где:
механическая скорость электродвигателя переменного тока в об/мин.
частота напряжения статора и токи электродвигателя переменного тока в Гц.
количество пар полюса двигателя.
Можно использовать предыдущее выражение, чтобы определить частоту ссылочных напряжений для необходимой скорости (для данной машины).
Используйте эту частоту, чтобы сгенерировать ссылочные напряжения PWM для инвертора. Вычислите величину напряжений путем поддержания отношения Вольт/Гц как:
При использовании системного представления на модуль система регулирования без обратной связи рассматривает Vrated как основное количество, которое обычно соответствует 1PU или 100%-й рабочий цикл. В зависимости от метода модуляции (или Синусоидальный PWM или Вектор Пробела PWM), вам, возможно, понадобится дополнительное усиление ( для синусоидального PWM). На более низких скоростях системе нужно минимальное напряжение вольтодобавки (15% или 25% номинального напряжения), чтобы преодолеть эффект падения напряжения сопротивления статора.
Можно использовать регулирование без обратной связи в приложениях, где динамический ответ не является беспокойством, и экономичное решение требуется. Блок управления приводом разомкнутого контура не имеет способности рассмотреть внешние условия, которые могут влиять на частоту вращения двигателя. Поэтому система управления не может автоматически откорректировать отклонение между желаемым и фактическими частотами вращения двигателя.
Примечание
Скалярная реализация управления не рассматривает компенсацию падения напряжения из-за сопротивления статора и полевого ослабления.
Управление с обратной связью принимает системную обратную связь во внимание для управления. Управление с обратной связью двигателя рассматривает обратную связь моторных сигналов как ток и положение. Система управления использует сигналы обратной связи отрегулировать напряжение (применился к двигателю) сохранить моторный ответ в ссылочном значении.
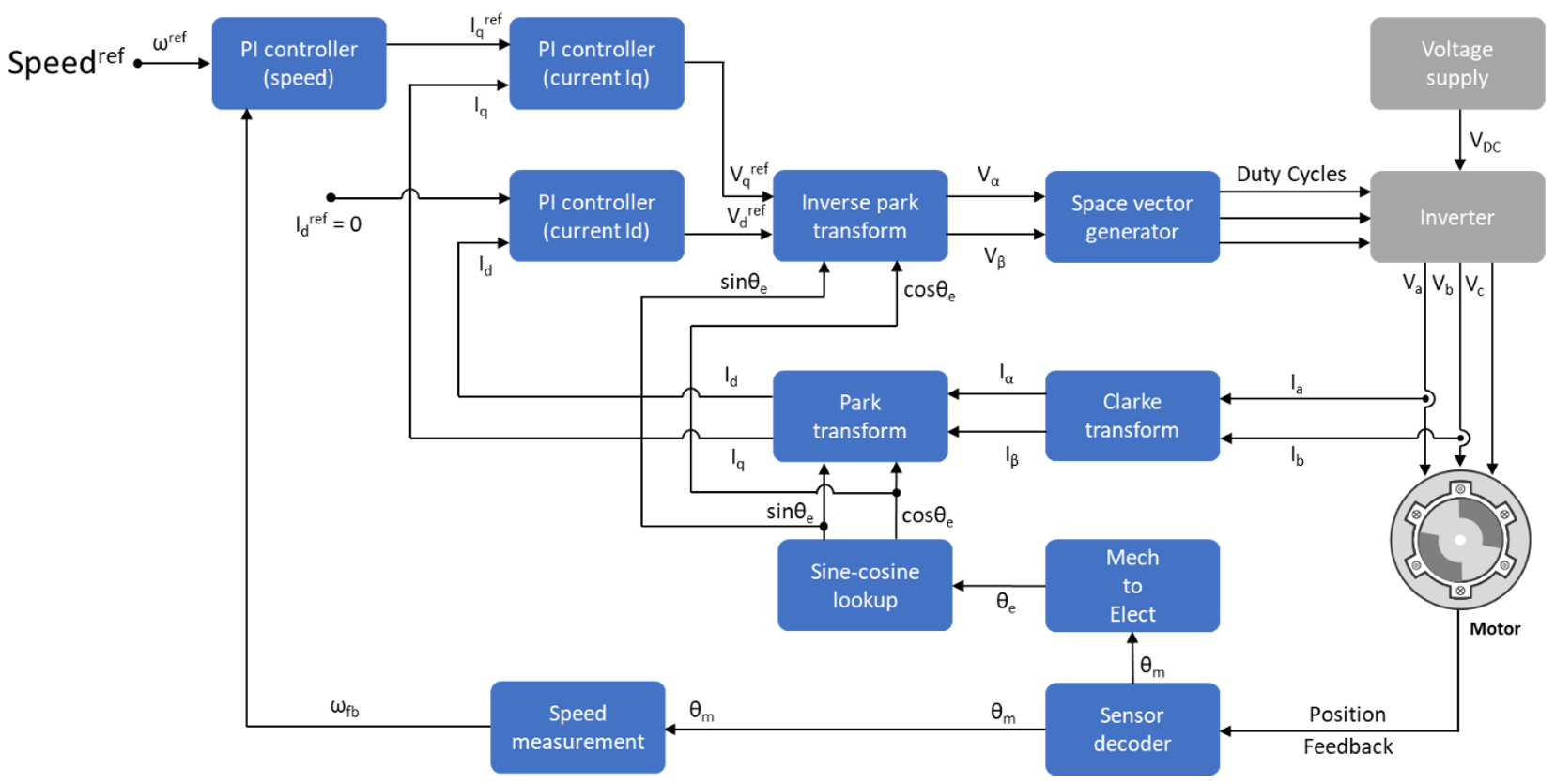
Ориентированное на поле управление (FOC) (или векторное управление) является популярной системой с обратной связью, которая используется в приложениях блока управления приводом. Метод FOC используется, чтобы реализовать крутящий момент с обратной связью, скорость и управление положением двигателей. Этот метод также предусматривает хорошую возможность управления по полному крутящему моменту и областям значений скорости. Для реализации FOC нужно преобразование токов статора от стационарной системы координат до системы координат потока ротора.
Регулировка скорости и управление крутящим моментом являются обычно используемыми режимами управления в FOC. Режим управления положения реже используется. Большинство приложений тяги использует режим управления крутящего момента, в котором система блока управления приводом следует за ссылочным значением крутящего момента. В режиме регулировки скорости моторный контроллер следует за значением задающей скорости и генерирует ссылку крутящего момента для управления крутящим моментом, которое формирует внутреннюю подсистему. Принимая во внимание, что в режиме управления положения контроллер скорости формирует внутреннюю подсистему.
Вам нужна обратная связь в реальном времени текущего положения и положения ротора, чтобы реализовать алгоритм FOC. Можно использовать датчики, чтобы измерить ток и положение ротора. Можно также использовать бездатчиковые методы, которые используют предполагаемые значения обратной связи вместо фактических основанных на датчике измерений.
Управление с обратной связью использует положение в реальном времени и статор текущая обратная связь, чтобы настроить контроллер скорости и токовый контроллер и изменить рабочие циклы инвертора. Это гарантирует, что откорректированное трехфазное предоставление напряжения (который запускает двигатель) корректирует моторное отклонение обратной связи от требуемого значения.
Некоторые приложения требуют, чтобы двигатель начал использовать регулирование без обратной связи. Когда двигатель достигает минимальной необходимой устойчивости в регулировании без обратной связи, система управления переключается на систему с обратной связью.
В системе, определение положения в которой осуществляется с помощью квадратурного энкодера, двигатель запускается в разомкнутом цикле и переходит к системе с обратной связью, когда детектируется сигнал полного поворота.
При бездатчиковом способе управления положением двигатель начинает вращаться на 10% от номинальное скорости в разомкнутом цикле. После того, как значение превышает 10% от номинальной скорости, системы управления от разомкнутого цикла переходит к системе с обратной связью.
Для обеспечения плавности перехода от разомкнутого цикла до системы с обратной связью, ПИ-контроллеры сбрасываются и начинают с того же начального условия, как выходные значения разомкнутой системы.
