В этом разделе описываются поток управления алгоритма ориентированного на поле управления (FOC), который используют примеры Motor Control Blockset™. Поток управления управляет использованием аппаратных событий наряду с инициированными прерываниями программного и аппаратного обеспечения. Этот рисунок описывает взаимодействия между аппаратными модулями и программными подсистемами.
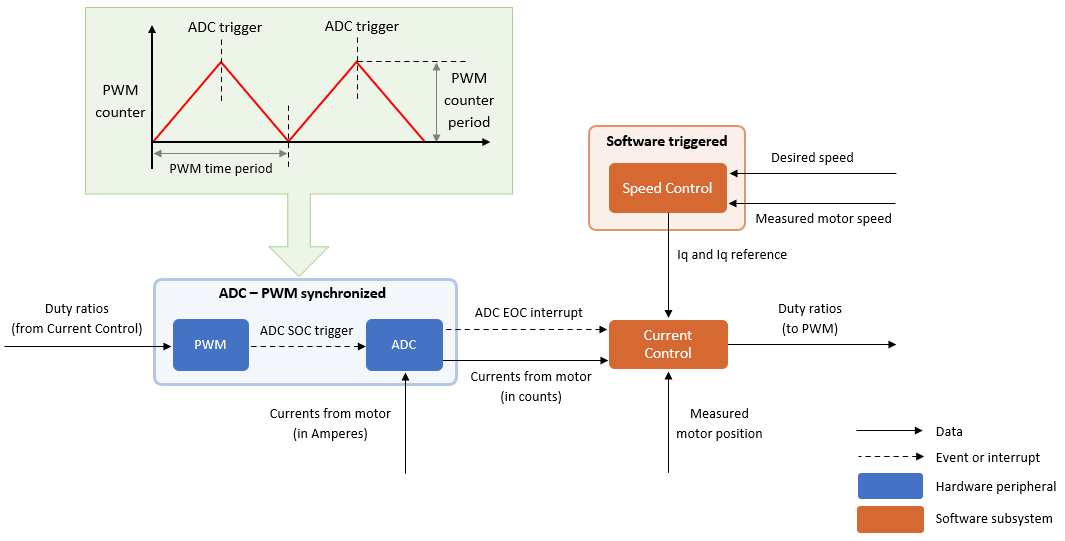
Основанные на FOC примеры обычно используют скорость передачи данных 20КГц для Current Control инициировал программную подсистему. Точно так же примеры используют скорость передачи данных 2КГц для Speed Control инициировал программную подсистему. Прерывание конца преобразования (EOC) ADC (аппаратное прерывание) инициировало текущую подсистему управления. Синхронизация PWM-ADC управляет уровнем этого триггера. Точно так же программное прерывание инициировало подсистему регулировки скорости.
Целая система использует внешние входные параметры для моторного положения, частоты вращения двигателя, моторных токов и желаемой частоты вращения двигателя. Предыдущий рисунок показывает взаимодействия между этими точками данных и вложенными подсистемами.
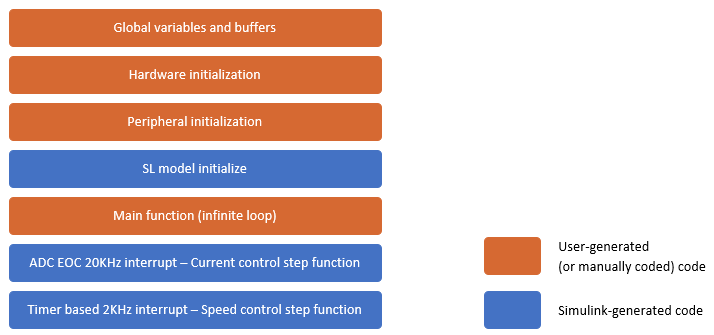
Motor Control Blockset обеспечивает Рабочие процессы экспорта алгоритма для примера Специального оборудования, которые включают Simulink® модели для текущих систем управления и регулировки скорости. Пример предоставляет инструкции сгенерировать код для этих моделей. Чтобы создать алгоритм FOC, который может работать на любом оборудовании блока управления приводом, интегрируйте этот сгенерированный код с кодом периферийного устройства (или автоматически сгенерированный или вручную записанный). Убедитесь, что вы активируете Current Control и системы Speed Control в подходящее время для предписанных временных интервалов как показано на предыдущем рисунке.
Следующий рисунок показывает целую структуру интегрированного кода.
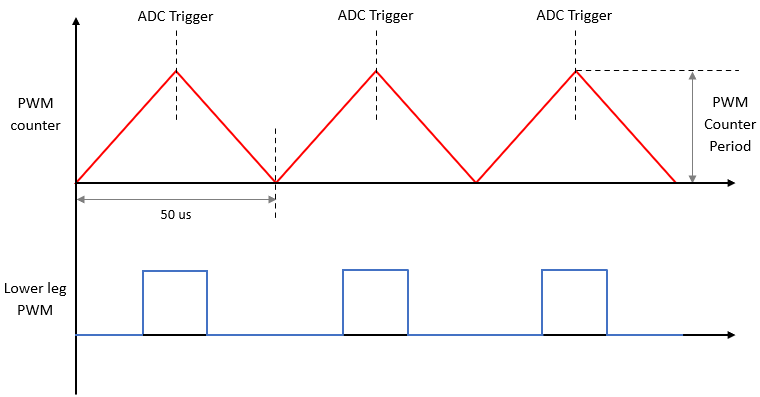
Взаимодействие между PWM и модулями ADC управляет уровнем инициирования подсистемы Current Control. Чтобы уменьшать гармоники в системе, PWM противостоят запускам в выровненном центром или вниз режиме. Мы конфигурируем PWM, таким образом, что, когда счетчик PWM достигает значения периода счетчика PWM, это инициировало событие запуска преобразования (SOC) ADC. Это гарантирует, что токи, доступные во входных параметрах ADC, являются обновленными токами, и поэтому, помогает измерить токи ADC правильно. Обычно, когда вы используете датчики тока шунта, чтобы измерить моторные токи, резистор текущего смысла расположен на голенях инвертора. Поэтому, если мы убеждаемся, чтобы включить голень ADC немного перед моментом, когда ADC, SOC инициирован (путем конфигурирования модуля PWM), мы можем гарантировать, что ADC читает токи правильно и что измеренные текущие значения являются средними значениями (текущие измерения, когда ток успокоился). Этот рисунок показывает это взаимодействие.
Для алгоритма FOC нужны текущее положение и скорость двигателя. Обычно или датчики положения или sensorless методы оценки помогают определить эти значения. Выбор метода обнаружения положения зависит от факторов такой, как стоится, свободное место, требуемая точность и само приложение блока управления приводом. Motor Control Blockset поддерживает эти методы обнаружения положения.
Датчики положения:
Квадратурный датчик энкодера
Датчик Холла
Преобразователь
Методы оценки позиции Sensorless:
Наблюдатель скользящего режима
Наблюдатель потока
Примеры FOC Motor Control Blockset используют протоколы последовательной передачи данных для обеспечения команд к двигателю и чтения связанной с отладкой информации из оборудования блока управления приводом. Для получения дополнительной информации об этом протоколе, смотрите, что Быстрые Последовательные данные Контролируют.
