Этот раздел объясняет, как оценить точность объекта (двигатель и инвертор) модель физического двигателя и загрузки, соединенной с двигателем. Подтвердите модель объекта управления и проверьте, что результаты близко к измерениям физической системы перед использованием модели объекта управления для реализации усовершенствованных алгоритмов. Можно подтвердить систему путем сравнения переходного процесса регулировки скорости и текущего управления в процессе моделирования и после развертывания на целевом компьютере, соединенном с двигателем.
Используйте Усиления Параметра Управления Мелодией в качестве примера в Оборудовании и Подтвердите Объект, чтобы измерить переходной процесс текущих контроллеров и контроллеров скорости. Модель хоста в этом примере передает текущую ссылку на целевой компьютер и измеряет переходной процесс токового контроллера.
Можно использовать любой пример регулировки скорости от Motor Control Blockset™, чтобы подтвердить систему.
Подтвердите регулировку скорости путем сравнения переходного процесса в процессе моделирования со значениями тестирования оборудования.
Подтвердите d - ось текущее управление электрически или механически блокировка ротора и сравнение переходного процесса в процессе моделирования результатами тестирования оборудования.
Можно использовать другой метод, чтобы подтвердить d - ось текущее управление. Запустите двигатель на постоянной скорости и обеспечьте ступенчатое изменение в ссылочном d - текущая ось. Это требует двух модификаций в подсистеме регулировки скорости целевой модели. Установите вход ссылки постоянной скорости. Команда ссылка Id из модели хоста. Сравните переходной процесс d - ось, текущая в процессе моделирования с ответом, полученным во время тестирования оборудования.
Подтвердите q - ось текущее управление путем механической связи двигателя с внешним динамометром, запускающимся в регулировке скорости. Это требует двух модификаций в подсистеме регулировки скорости целевой модели. Отбросьте Id и ссылку Iq от ПИ-контроллера скорости выход. Команда ссылка Id из модели хоста. Сравните переходной процесс q - ось, текущая в процессе моделирования с ответом, полученным во время тестирования оборудования.
Предупреждение
При получении переходного процесса в d - ось текущее управление, всегда используйте положительный шаг. Отрицательные величины Id могут повредить постоянный магнит в PMSM.
Смотрите Усиления Параметра Управления Мелодией в качестве примера в Оборудовании и Подтвердите Объект, чтобы развернуть модель в оборудование. Выполните оценку параметра двигателя, потому что точная модель объекта управления важна, чтобы гарантировать, что результаты симуляции совпадают с результатами тестирования оборудования.
Прежде, чем сравнить ответы контроллера в процессе моделирования с ответами, полученными после развертывания целевого компьютера, крутящий момент нагрузки в симуляции объекта должен совпадать с моторной загрузкой в физической системе. Выполните эти шаги, чтобы вычислить крутящий момент нагрузки в физической системе и обновить расчетный крутящий момент нагрузки в модели объекта управления.
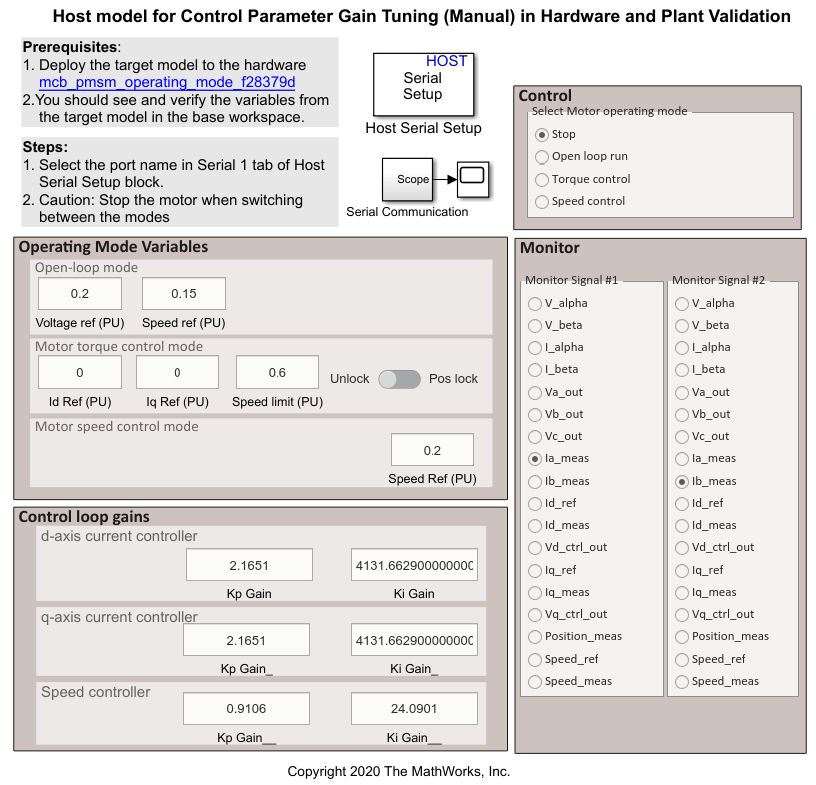
Запустите модель хоста, чтобы соединить его с целевым компьютером посредством последовательной передачи.
Установите Select Motor operating mode на Speed control.
Двигатель вращается в регулировке скорости.
Выберите Id_meas in Monitor Signal #1 и Iq_meas in Monitor signal #2. Считайте Id_meas и Iq_meas значения от осциллографа.
Преобразуйте на модуль (PU), текущий в Амперы путем умножения его с PU_System.I_base.
Вычислите крутящий момент нагрузки в Nm с помощью этого уравнения:
где,
= Магнитное потокосцепление Permanment (pmsm.Flux_PM)
= Индуктивность в Генри (pmsm.Ld, pmsm.Lq)
= Текущий измеренный в Амперах
Id_meas, измеренный I d текущий (в PU), равняется 0.
В mcb_pmsm_operating_mode_f28379d/Motor and Inverter/Plant Model (sim) система sub, введите расчетное значение крутящего момента нагрузки как вход к порту LdTrq моторного блока PMSM.
В процессе моделирования обеспечьте вход шага скорости и отметьте ответ скорости. На целевом компьютере управляйте входом шага ссылки скорости и наблюдайте обратную связь скорости. Сравните получившийся переходной процесс в процессе моделирования с ответом, полученным из целевого компьютера, чтобы определить точность модели объекта управления.
Симулируйте модель mcb_pmsm_operating_mode_f28379d. Постройте задающую скорость и измеренные сигналы скорости. По умолчанию этот пример обеспечивает вход шага 0.2 к 0.5 к имитационной модели.
Запустите модель хоста, чтобы связаться с целевым компьютером.
Измените Select Motor operating mode от Stop до Speed control.
В модели хоста выберите Speed_ref in Monitor Signal#1 и Speed_meas in Monitor Signal#2.
Откройте осциллограф в модели хоста.
В интерфейсе модели хоста измените speed_ref от 0.2 к 0.5 и наблюдайте ступенчатое изменение в осциллографе.
Сравните переходной процесс, полученный из оборудования с результатами симуляции.
Сравните переходной процесс, полученный из симуляции с измерениями, полученными из целевого компьютера. Результаты могут варьироваться в зависимости от допусков по модели объекта управления. Обычно результаты симуляции близко к значениям, измеренным на целевом компьютере.
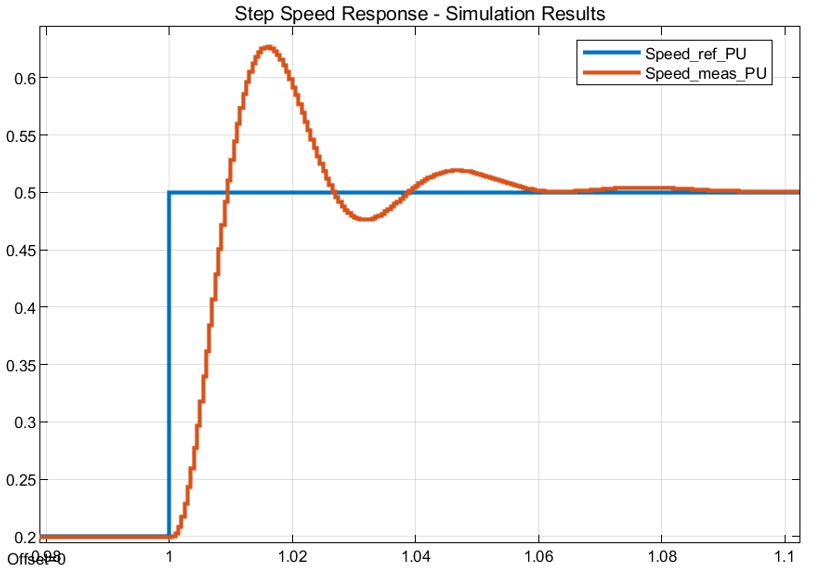
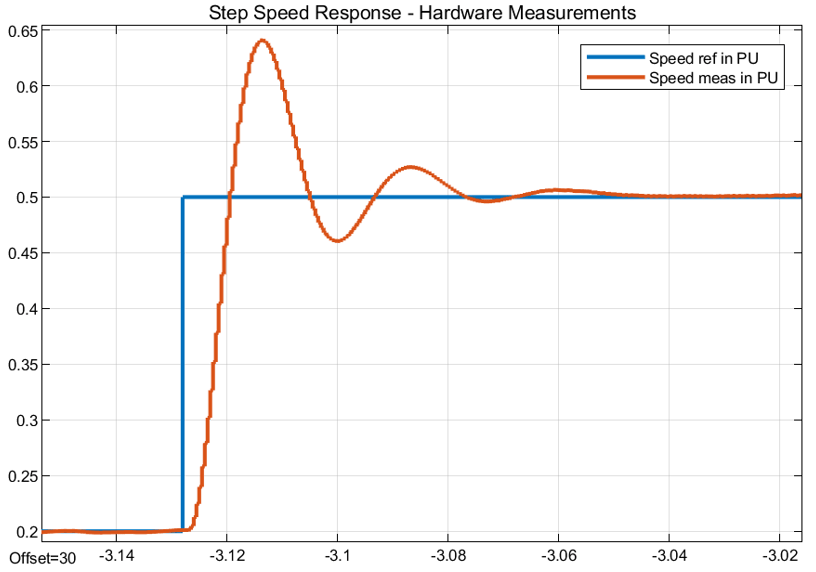
| Пиковое перерегулирование (%) | Пиковое время (мс) | Время нарастания (мс) | Время урегулирования (мс) | |
|---|---|---|---|---|
| Результаты симуляции | 20.13% | 16.023 | 5.561 | 61.027 |
| Аппаратные результаты | 22 % | 14.324 | 5.041 | 51.148 |
В процессе моделирования предоставьте шагу текущую ссылку и отметьте текущий ответ. Для этого примера нужны некоторые изменения, чтобы симулировать текущий ссылочный вход шага. Выполните эти шаги, чтобы выполнить изменения модели. При использовании целевого компьютера управляйте текущим ссылочным входом шага и наблюдайте текущую обратную связь. Сравните получившийся переходной процесс в симуляции с ответом, полученным из целевого компьютера, чтобы определить точность модели объекта управления.
Для аппаратных измерений запустите модель хоста.
Измените Select Motor operating mode от Stop до Torque control.
Выберите Id_ref in Monitor Signal#1 и Id_meas in Monitor Signal#2 в модели хоста.
Откройте осциллограф в модели хоста.
Измените Id_ref от 0.02 к 0.22 и наблюдайте ступенчатое изменение в осциллографе. Убедитесь, что двигатель не запускается. Осциллограф отображает переходной процесс для Id_ref входной параметр.
Для симуляции внесите эти два изменения в модели. В mcb_pmsm_operating_mode_f28379d/TorqueControl/Control Modes/torque_control подсистема добавляет вход шага для d - токовый контроллер оси. Выберите вход шага 0.02 к 0.22 в 1 второй. Выберите выборку времени как -1. В блоке преобразования типа данных выберите выходной тип данных как fixdt(1,32,17).
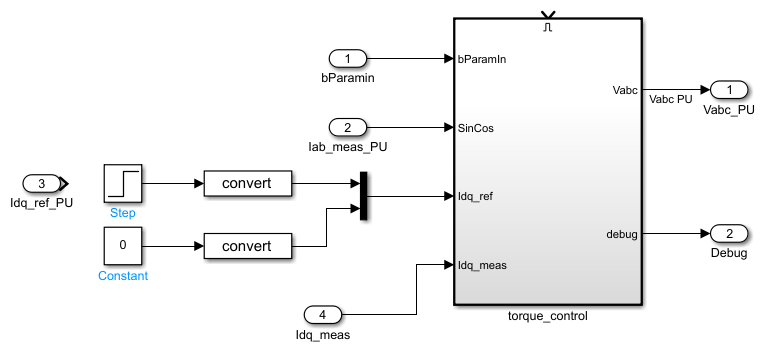
В моторном блоке PMSM, доступном в mcb_pmsm_operating_mode_f28379d/Motor and Inverter/Plant Model (sim) подсистема, измените Mechanical input configuration в Speed и вход 0 к входному порту Spd.
Запустите симуляцию и измерьте Idref_PU и Idmeas_PU значения в Инспекторе Данных моделирования.
Сравните переходной процесс, полученный из оборудования с результатами симуляции.
Сравните результаты осциллографа, полученные из симуляции с измерениями от целевого компьютера. Результаты могут варьироваться в зависимости от допусков по модели объекта управления. С точной моделью объекта управления результаты симуляции ближе к измеренным результатам целевого компьютера.
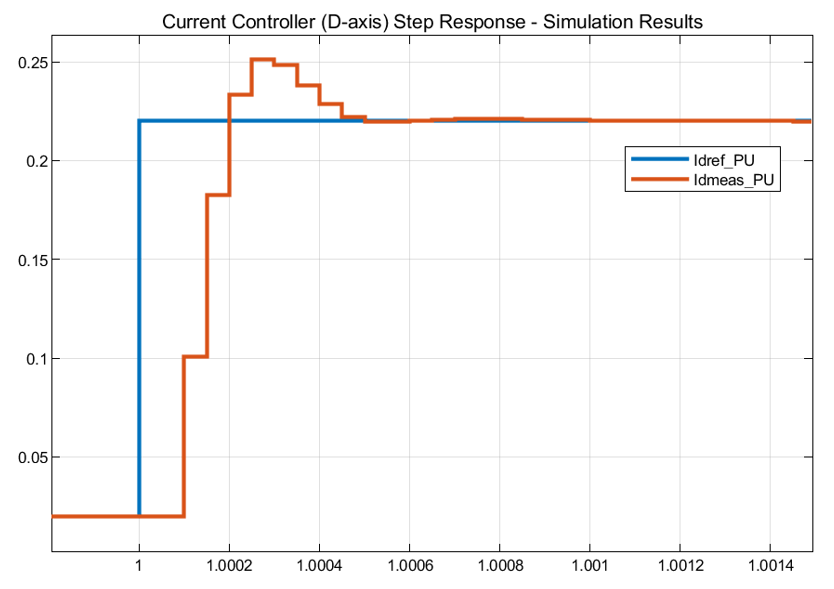
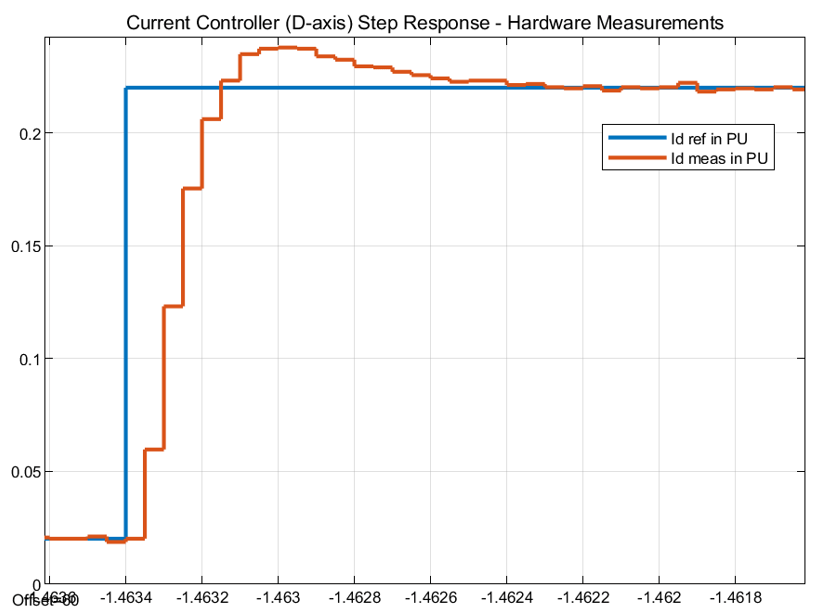
| Пиковое перерегулирование (%) | Пиковое время (µs) | Время нарастания (µs) | Время урегулирования (µs) | |
|---|---|---|---|---|
| Результаты симуляции | 14 % | 300 | 150 | 500 |
| Аппаратные результаты | 8.18 % | 400 | 150 | 800 |
Точность модели объекта управления улучшает точность симуляции, и поэтому, это помогает совпадать с результатами симуляции к результатам тестирования оборудования.
Совет
Если результаты симуляции значительно отличаются от аппаратных измерений, проверяют величину задержки и масштабный коэффициент в модели объекта управления.
Примечание
Для q - токовый контроллер оси, выровняйте двигатель к d - ось и механически заблокируйте ротор. Следуйте за этим для d - токовый контроллер оси для сравнительного анализа. Можно достигнуть внешней блокировки механического устройства через механическую тормозную систему или путем связи с динамометрическим моторным выполнением в регулировке скорости.
