В среде Неимен-Пирсона вероятность обнаружения максимизируется удовлетворяющая ограничению, что ложно-сигнальная вероятность не превышает заданный уровень. Ложно-сигнальная вероятность зависит от шумового отклонения. Поэтому, чтобы вычислить ложно-сигнальную вероятность, необходимо сначала оценить шумовое отклонение. Если шумовое отклонение изменяется, необходимо настроить порог, чтобы обеспечить постоянный ложно-сигнальный уровень. Постоянные ложно-сигнальные детекторы уровня реализуют адаптивные процедуры, которые позволяют вам обновить пороговый уровень своего теста, когда степень интерференции изменяется.
Чтобы мотивировать потребность в адаптивной процедуре, примите простой бинарный тест гипотезы, где необходимо решить между гипотезами сигнала существующими и сигнала отсутствующими для одной выборки. Сигнал имеет амплитуду 4, и шум является нулевым средним значением, Гауссовым с модульным отклонением.


Во-первых, установите ложно-сигнальный уровень на 0,001 и определите порог.
T = npwgnthresh(1e-3,1,'real');
threshold = sqrt(db2pow(T))
threshold =
3.0902
Проверяйте, что этот порог дает к желаемой ложно-сигнальной вероятности уровня, и затем вычислите вероятность обнаружения.
pfa = 0.5*erfc(threshold/sqrt(2)) pd = 0.5*erfc((threshold-4)/sqrt(2))
pfa =
1.0000e-03
pd =
0.8185
Затем примите, что шумовая мощность увеличивается на 6,02 дБ, удваивая шумовое отклонение. Если ваш детектор не адаптируется к этому увеличению отклонения путем определения нового порога, ложно-сигнальные повышения ставки значительно.
pfa = 0.5*erfc(threshold/2)
pfa =
0.0144
Следующий рисунок показывает эффект увеличения шумового отклонения на ложно-сигнальной вероятности для фиксированного порога.
noisevar = 1:0.1:10; noisepower = 10*log10(noisevar); pfa = 0.5*erfc(threshold./sqrt(2*noisevar)); semilogy(noisepower,pfa./1e-3) grid on title('Increase in P_{FA} due to Noise Variance') ylabel('Increase in P_{FA} (Orders of Magnitude)') xlabel('Noise Power Increase (dB)')

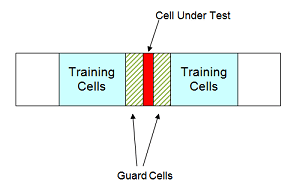
Составляющий в среднем ячейку детектор CFAR оценивает шумовое отклонение для ячейки области значений интереса или ячейки под тестом, путем анализа данных из соседних ячеек области значений, определяемых как учебные ячейки. Шумовые характеристики в учебных ячейках приняты, чтобы быть идентичными шумовым характеристикам в ячейке под тестом (CUT).
Это предположение является ключом в выравнивании по ширине использования учебных ячеек, чтобы оценить шумовое отклонение в CUT. Кроме того, составляющий в среднем ячейку детектор CFAR принимает, что учебные ячейки не содержат сигналов от целей. Таким образом данные в учебных ячейках состоят из шума только.
Сделать эти предположения реалистичными:
Желательно иметь некоторый буфер или guard cells, между CUT и учебными ячейками. Буфер, обеспеченный защитными ячейками, принимает меры против сигнала, просачивающегося в учебные ячейки и оказывающего негативное влияние на оценку шумового отклонения.
Учебные ячейки не должны представлять ячейки области значений, слишком удаленные в диапазоне от CUT, когда следующая фигура иллюстрирует.
Оптимальное средство оценки для шумового отклонения зависит от дистрибутивных предположений и типа детектора. Примите следующее:
Вы используете квадратичный детектор.
У вас есть Гауссова, случайная переменная (RV) с комплексным знаком с независимыми действительными и мнимыми частями.
Действительные и мнимые части у каждого есть средний нуль и отклонение, равное σ2/2.
Примечание
Если вы обозначаете этот RV Z=U+jV, величина в квадрате |Z |2 следует за экспоненциальным распределением со средним значением σ2.
Если выборки в учебных ячейках являются величинами в квадрате такого комплексного Гауссова RVs, можно использовать демонстрационное среднее значение в качестве средства оценки шумового отклонения.
Чтобы реализовать составляющее в среднем ячейку обнаружение CFAR, используйте phased.CFARDetector. Можно настроить характеристики детектора, такие как количества учебных ячеек и охранять ячейки и вероятность ложного предупреждения.
В этом примере показано, как создать детектор CFAR и протестировать его способность адаптироваться к статистике входных данных. Тест использует испытания только для шума. При помощи квадратичного детектора по умолчанию можно определить, как близко эмпирический ложно-сигнальный уровень к желаемой ложно-сигнальной вероятности.
Примечание: Этот пример запускается только в R2016b или позже. Если вы используете более ранний релиз, заменяете каждый вызов функции с эквивалентным step синтаксис. Например, замените myObject(x) с step(myObject,x).
Создайте объект детектора CFAR с двумя защитными ячейками, 20 учебными ячейками и ложно-сигнальной вероятностью 0,001. По умолчанию этот объект принимает квадратичный детектор без импульсного интегрирования.
detector = phased.CFARDetector('NumGuardCells',2,... 'NumTrainingCells',20,'ProbabilityFalseAlarm',1e-3);
Существует 10 учебных ячеек и 1 защитная ячейка на каждой стороне ячейки под тестом (CUT). Установите индекс CUT на 12.
CUTidx = 12;
Отберите генератор случайных чисел для восстанавливаемого набора входных данных.
rng(1000);
Установите шумовое отклонение на 0,25. Это значение соответствует аппроксимированному ОСШ на-6 дБ. Сгенерируйте 23 10000 матрица белого Гауссова rv's с комплексным знаком с заданным отклонением. Каждая строка матрицы представляет 10 000 испытаний Монте-Карло за отдельную ячейку.
Ntrials = 1e4; variance = 0.25; Ncells = 23; inputdata = sqrt(variance/2)*(randn(Ncells,Ntrials)+1j*randn(Ncells,Ntrials));
Поскольку пример реализует квадратичный детектор, возьмите величины элементов в квадрате в матрице данных.
Z = abs(inputdata).^2;
Обеспечьте выход от квадратичного оператора и индекса ячейки под тестом к детектору CFAR.
Z_detect = detector(Z,CUTidx);
Выход, Z_detect, логический вектор с 10 000 элементов. Суммируйте элементы в Z_detect и разделитесь на общее количество испытаний, чтобы получить эмпирический ложно-сигнальный уровень.
pfa = sum(Z_detect)/Ntrials
pfa = 0.0013
Эмпирический ложно-сигнальный уровень 0.0013, который соответствует тесно желаемому ложно-сигнальному уровню 0,001.
Составляющий в среднем ячейку алгоритм для детектора CFAR работает хорошо во многих ситуациях, но не всех. Например, когда цели тесно расположены, ячейка, составляющая в среднем, может заставить сильную цель маскировать слабую цель поблизости. phased.CFARDetector Система object™ поддерживает следующие алгоритмы обнаружения CFAR.
| Алгоритм | Типичное использование |
|---|---|
| Составляющий в среднем ячейку CFAR | Большинство ситуаций |
| Самый большой - составляющего в среднем ячейку CFAR | Когда важно избежать, чтобы ложь предупредила в ребре помехи |
| Самый маленький - составляющего в среднем ячейку CFAR | Когда цели тесно расположены |
| Закажите статистический CFAR | Пойдите на компромисс между самым большим - и самый маленький - усреднения ячейки |
В этом примере показано, как сравнить вероятность обнаружения, следующего из двух алгоритмов CFAR. В этом сценарии алгоритм статистической величины порядка обнаруживает цель, которую не делает составляющий в среднем ячейку алгоритм.
Примечание: Этот пример запускается только в R2016b или позже. Если вы используете более ранний релиз, заменяете каждый вызов функции с эквивалентным step синтаксис. Например, замените myObject(x) с step(myObject,x).
Создайте детектор CFAR, который использует составляющий в среднем ячейку алгоритм CFAR.
Ntraining = 10; Nguard = 2; Pfa_goal = 0.01; detector = phased.CFARDetector('Method','CA',... 'NumTrainingCells',Ntraining,'NumGuardCells',Nguard,... 'ProbabilityFalseAlarm',Pfa_goal);
Детектор имеет 2 защитных ячейки, 10 учебных ячеек и ложно-сигнальную вероятность 0,01. Этот объект принимает квадратичный детектор без импульсного интегрирования.
Сгенерируйте вектор из входных данных на основе белой Гауссовой случайной переменной с комплексным знаком.
Ncells = 23;
Ntrials = 100000;
inputdata = 1/sqrt(2)*(randn(Ncells,Ntrials) + ...
1i*randn(Ncells,Ntrials));Во входных данных замените строки 8 и 12, чтобы симулировать две цели для детектора CFAR, чтобы обнаружить.
inputdata(8,:) = 3*exp(1i*2*pi*rand); inputdata(12,:) = 9*exp(1i*2*pi*rand);
Поскольку пример реализует квадратичный детектор, возьмите величины элементов в квадрате в векторе входных данных.
Z = abs(inputdata).^2;
Выполните обнаружение на строках 8 - 12.
Z_detect = detector(Z,8:12);
Z_detect матрица имеет пять строк. Первые и последние строки соответствуют симулированным целям. Три средних строки соответствуют шуму.
Вычислите вероятность обнаружения двух целей. Кроме того, оцените вероятность ложного предупреждения с помощью строк только для шума.
Pd_1 = sum(Z_detect(1,:))/Ntrials
Pd_1 = 0
Pd_2 = sum(Z_detect(end,:))/Ntrials
Pd_2 = 1
Pfa = max(sum(Z_detect(2:end-1,:),2)/Ntrials)
Pfa = 6.0000e-05
0 значение Pd_1 указывает, что этот детектор не обнаруживает первую цель.
Измените детектор CFAR, таким образом, он использует алгоритм CFAR статистической величины порядка с рангом 5.
release(detector);
detector.Method = 'OS';
detector.Rank = 5;Повторите расчеты вероятности и обнаружение.
Z_detect = detector(Z,8:12); Pd_1 = sum(Z_detect(1,:))/Ntrials
Pd_1 = 0.5820
Pd_2 = sum(Z_detect(end,:))/Ntrials
Pd_2 = 1
Pfa = max(sum(Z_detect(2:end-1,:),2)/Ntrials)
Pfa = 0.0066
Используя алгоритм статистической величины порядка вместо составляющего в среднем ячейку алгоритма, детектор обнаруживает первую цель приблизительно в 58% испытаний.
