В системах с обратной связью соединения и ограничения должны быть взаимно совместимыми. Например, в четырёхзвеннике, все шарнирные соединения должны вращаться о параллельных осях. Если одно из вращений соединений о различной оси, сбоях блока и модели не симулирует.
Чтобы упростить процесс поиска и устранения неисправностей, Simscape™ Multibody™ предоставляет Отчет Модели. Этот инструмент помогает вам точно определить соединения и ограничения, которые заставили блок перестать работать. Если вы идентифицируете эти соединения и ограничения, можно затем определить, какую из их систем координат, чтобы откорректировать — и как откорректировать их.
В этом примере вы идентифицируете ошибочный источник блока в модели механизма стремления, использующей Отчет Модели. Затем с помощью Mechanics Explorer вы определяете, как откорректировать тот ошибочный источник. sm_dcrankaim_assembly_with_error известный пример обеспечивает базис для этого примера.
Открыть модель, в MATLAB® командная строка, введите sm_dcrankaim_assembly_with_error. Модель открывается в новом окне.
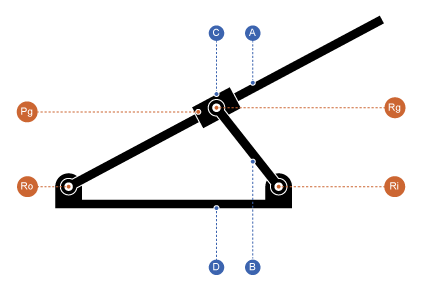
Рисунок показывает схематическую из системы, что модель представляет. Эта система содержит четыре тела, пометил A-D. Эти тела подключение в замкнутом цикле через четыре соединения, пометил Ri, Ro, Rg и Pg. Когда соединено друг с другом, эти компоненты формируют систему с одной степенью свободы.
Модель представляет компоненты этого системного использования блоки. Каждый блок представляет физический компонент. Блок World Frame обеспечивает конечную систему отсчета в модели. Рисунок показывает блок-схему что использование модели, чтобы представлять двойную заводную рукоятку, нацеливающую механизм.
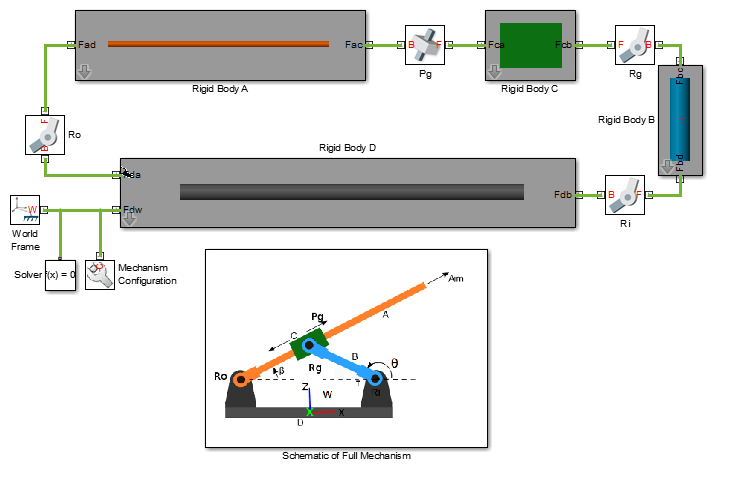
Чтобы представлять тела, модель содержит четыре блока подсистемы, пометил Rigid Body A-D. Каждая подсистема содержит один блок Cylindrical Solid и несколько блоков Твердого Преобразования. Блок Cylindrical Solid обеспечивает геометрию, инерцию и цвет к подсистеме тела. Блоки Rigid Transform обеспечивают системы координат, с которыми вы соединяете соединения. Блок Reference Frame идентифицирует конечную систему отсчета в блоке подсистемы.
Модель помечает Твердое тело блоков подсистемы тела A-D. Чтобы исследовать блок-схему на подсистему тела, щелкните правой кнопкой по блоку подсистемы и выберите Mask> Look Under Mask. Рисунок показывает блок-схему для Твердого тела A.
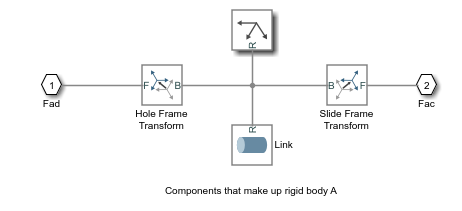
Чтобы представлять соединения, модель содержит четыре блока соединений. Три соединения обеспечивают одну вращательную степень свободы между парой тел. Вы представляете каждое из этих соединений с блоком Revolute Joint. Четвертое соединение обеспечивает одну поступательную степень свободы между парой тел. Вы представляете это соединение блоком Prismatic Joint. Модель помечает блоки шарнирного соединения Ro, Rg, и Ri и призматической Стр. блока соединений.
Как имя модели предполагает, эта модель содержит ошибку. Ошибка препятствует тому, чтобы модель собралась успешно, который заставляет симуляцию перестать работать. Обновить модель и исследовать ошибку блока:
Во вкладке Modeling нажмите Update Model.
Mechanics Explorer открывается статическим отображением вашей модели в ее начальном состоянии. Поскольку модель содержит ошибку блока, Simscape Multibody выдает ошибку сообщение. Проигнорируйте то сообщение на данный момент.
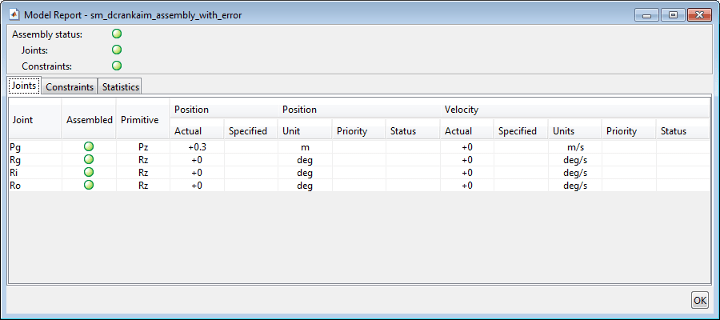
Mechanics Explorer обеспечивает доступ к Отчету Модели, утилита Simscape Multibody, которая обобщает состояние блока каждого соединения и ограничения в модели. Откройте эту утилиту, чтобы определить, какому соединению не удалось собраться. Для этого, в панели меню Mechanics Explorer, выберите Tools> Model Report.
Отчет модели открывается в новом окне. Красный квадрат указывает, что модели, как ожидалось, не удалось собраться. Второй красный квадрат указывает, что несобранное соединение, Pg, является единственным влияющим фактором по ошибке сборки блока. Эта информация позволяет вам сконцентрировать свои усилия по поиску и устранению неисправностей на небольшой области блок-схемы — что, окружая блок соединений Pg.
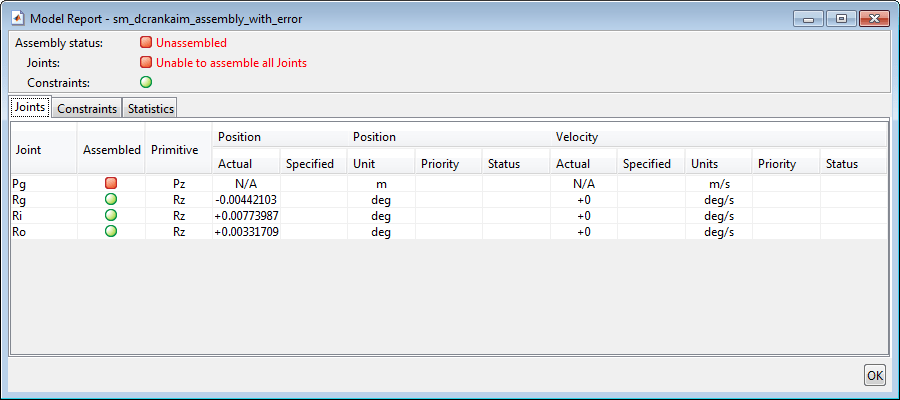
Сообщение об ошибке, что Simscape Multibody, выпущенный во время обновления модели, идентифицирует нарушение положения как первопричину отказа блока. Это предполагает, что системы координат, соединенные объединенным Pg, неправильно выравниваются. Чтобы подтвердить эту гипотезу, проверяйте ориентацию этих систем координат в Mechanics Explorer.
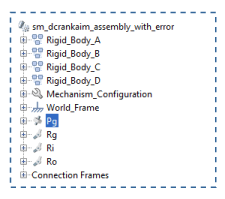
В панели дерева Mechanics Explorer выберите Pg.
В панели визуализации Mechanics Explorer исследуйте положение и ориентацию подсвеченных систем координат. Это системы координат, которые появляются в светло-бирюзовом синем цвете.
Две системы координат возмещены вдоль оси Z. Это смещение допустимо, поскольку объединенный Pg содержит призматический примитив, выровненный с осью Z, предоставляя системам координат одну поступательную степень свободы вдоль той оси. Однако две системы координат также вращаются друг относительно друга об общей оси Z. Это смещение недопустимо, поскольку объединенный Pg не содержит Вращательных или Сферических примитивов, и следовательно никаких вращательных степеней свободы ни о какой оси. Чтобы откорректировать ошибку сборки блока, необходимо вращать любую из двух систем координат так, чтобы все их оси были параллельны друг другу.
В этом примере вы применяете преобразование вращения к системе координат последователя так, чтобы ее оси легли параллельные осям базовой системы координат. В качестве альтернативы вы могли применять эквивалентное преобразование вращения к базовой системе координат. Этот шаг включает объединенный Pg, и следовательно саму модель, чтобы собраться успешно.
В древовидной панели Mechanics Explorer щелкните правой кнопкой по узлу Pg и выберите Go To Block. Simscape Multibody выявляет блок-схему и подсвечивает блок Pg.
Щелкните правой кнопкой по блоку подсистемы Rigid Body C и выберите Mask> Look Under Mask.
Дважды кликните блок Slide Frame Transform и выберите новые значения параметров, которые обеспечивает таблица. Выберите OK.
| Параметр | Новое значение |
|---|---|
| Rotation> Pair 2> Follower | +X |
| Rotation> Pair 2> Base | +Y |
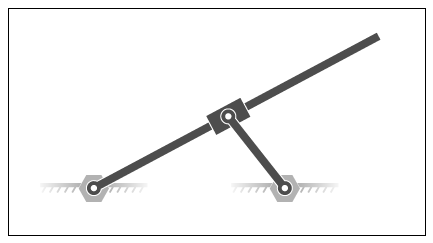
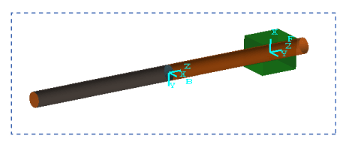
Можно теперь симулировать модель. Mechanics Explorer открывается 3-D анимацией вашей модели. Рисунок показывает снимок состояния анимации. Вращайтесь, прокрутите, панорамируйте, и изменение масштаба, чтобы исследовать.
Можно использовать инструмент Model Report, чтобы проверить состояние блока. Для этого, в панели меню Mechanics Explorer, выберите Tools> Model Report. В Отчете Модели проверяйте, что значки состояния блока для модели и ее соединений являются зелеными кругами. Зеленые круги указывают, что модель собралась правильно.