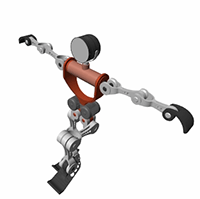
URDF или Объединенный Формат Описания Робототехники, является спецификацией XML, используемой в академической среде и промышленности для моделирования систем мультител, такого как руки роботов-манипуляторов для производства сборочных конвейеров и аниматронных роботов для парков развлечений. URDF особенно популярен у пользователей ROS (Robotics Operating System) — среда, которая предлагает стандартную поддержку моделей URDF. Можно импортировать модели URDF в среду Simscape™ Multibody™, например, для симуляции, анализа и задач системы управления. Смотрите, что Гуманоидный Робот показал пример для простого варианта использования.
Гуманоидный робот модель URDF
Как другие типы XML-файлов, файлы URDF включают различные элементы XML, такие как <robot>, <link>, <joint>, вложенный в иерархических структурах, известных как деревья XML. Например, <link> и <joint> элементами, как говорят, являются дочерние элементы <robot> элемент и, взаимно, <robot> элемент родительский элемент <link> и <joint> элементы.
<robot> <link> ... </link> <link> ... </link> <joint> ... </joint> </robot>
Дочерние элементы, такие как <link> и <joint> под <robot>, может в свою очередь иметь дочерние собственные элементы. Например, <link> элемент имеет дочерние элементы <inertial> и <visual>. <visual> элемент имеет дочерние элементы <geometry> и <material>. И <material> элемент имеет дочерний элемент <color>. Такие цепи дочерних элементов важны, чтобы задать свойства и поведение родительских элементов.
<robot> <link> <inertial> ... </inertial> <visual> <geometry> ... </geometry> <material> <color /> </material> </visual> </link> ... </robot>
В дополнение к дочерним элементам элементы XML в модели URDF могут иметь атрибуты. Например, <robot>, <link>, и <joint> элементы у всех есть атрибут <name>— строка, которая служит, чтобы идентифицировать элемент. <color> элемент имеет атрибут rgba— числовой массив с красным, зеленым, синим цветом, и альфа (или непрозрачность) значения цвета ссылки. Приписывает, такие как они, помогают полностью задать элементы в модели.
<robot name = "linkage"> <link name = "root link"> <inertial> ... </inertial> <visual> <geometry> ... </geometry> <material> <color rgba = "1 0 0 1" /> </material> </visual> </link> ... </robot>
URDF соединяет подключение через соединения в иерархических структурах, мало чем отличающихся от сформированных вложенными элементами XML в файле URDF. <joint> элементы осуществляют эти иерархии через <parent> и <child> элементы, которые идентифицируют одну ссылку как родительский элемент и другой как дочерний элемент. Родительские ссылки могут самостоятельно быть дочерними элементами — и дочерними родительскими элементами ссылок — других ссылок в модели.
<parent> и <child> Элементы joint
<robot name = "linkage"> <joint name = "joint A ... > <parent link = "link A" /> <child link = "link B" /> </joint> <joint name = "joint B ... > <parent link = "link A" /> <child link = "link C" /> </joint> <joint name = "joint C ... > <parent link = "link C" /> <child link = "link D" /> </joint> </robot>
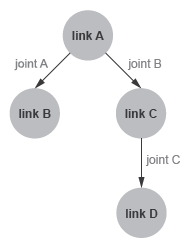
Можно визуализировать связи между ссылками с помощью схематического, известного как connectivity graph. Рисунок показывает пример. Круги обозначают ссылки, и стрелы обозначают соединения. Корни стрелы идентифицируют родительские узлы и наконечники стрел дочерние узлы. График возможности соединения показывает топологию базовой модели — здесь простая древовидная кинематическая структура с двумя ветвями.
График возможности соединения древовидной кинематической структуры
Топология модели важна в URDF. График возможности соединения модели может принять форму только древовидной кинематической структуры — кинематическая цепь, перешел или без ветвей, который всегда открыт. Кинематические замкнутые цепи, каждый закрытая цепь, сформированная путем присоединения концов в противном случае открытой цепи, запрещены. Это ограничение влияет как <link> элементы могут соединиться в модели URDF.
Ограничение переводит в следующее правило: никакой <link> элемент может служить дочерним узлом больше чем в одном <joint> элемент. Другими словами, никакой <link> элемент может иметь больше чем один родительский элемент в графике возможности соединения модели. Только корневая ссылка, в начале координат графика возможности соединения, может иметь много родительских узлов, отличающихся от одного (нуль). Только одна корневая ссылка позволена в модели.
Кинематическая замкнутая цепь пример URDF
<robot name = "linkage"> <joint name = "joint A ... > <parent link = "link A" /> <child link = "link B" /> </joint> <joint name = "joint B ... > <parent link = "link A" /> <child link = "link C" /> </joint> <joint name = "joint C ... > <parent link = "link C" /> <child link = "link D" /> </joint> <joint name = "joint D ... > <parent link = "link B" /> <child link = "link D" /> </joint> </robot>
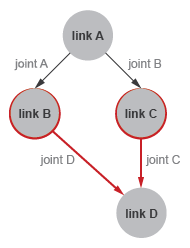
Код объявляет ссылку, link D, как дочерний узел в двух <joint> элементы, joint C и joint D. link D элемент имеет два родительских элемента и формирует кинематическую замкнутую цепь. Модель нарушает правила связи URDF и недопустима. Рисунок показывает график возможности соединения модели.
График возможности соединения кинематической замкнутой цепи
Не все элементы и атрибуты, перечисленные в спецификации URDF, требуются. Некоторые, как <inertial> под <link>, являются дополнительными. Следующий код показывает различные элементы и атрибуты, что можно использовать с теми, которые являются дополнительным цветным зеленым.
Элементы и атрибуты, показанные как требуется в дополнительных элементах, так, только если дополнительные элементы используются. Значения по умолчанию дополнительных атрибутов показывают в круглых скобках и в курсивном шрифте. Обратите внимание на то, что этот код включен только как ссылка и что он не представляет допустимую модель URDF. Эллипсы (“...”) недопустимы в моделях URDF и используются просто, чтобы повредить длинные линии кода для простоты просмотра.
<robot name> <link name> <inertial> <origin xyz("0 0 0") rpy("0 0 0") /> <mass value /> <inertia ixx iyy izz ixy ixz iyz /> </inertial> <visual name> <origin xyz("0 0 0") rpy("0 0 0") /> <geometry> <box size /> <cylinder radius length /> <sphere radius /> <mesh filename scale("1") /> </geometry> <material name> <color rgba("0.5 0.5 0.5 1") /> <texture filename /> </material> </visual> <collision name> <origin xyz("0 0 0") rpy("0 0 0") /> <geometry> <box size /> <cylinder radius length /> <sphere radius /> <mesh filename scale("1") /> </geometry> </collision> </link> <joint name type> <origin xyz("0 0 0") rpy("0 0 0") /> <parent link /> <child link /> <axis xyz("1 0 0") /> <calibration rising /> <calibration falling /> <dynamics damping("0") friction("0") /> <limit† lower† upper† effort velocity /> <mimic joint multiplier("1") offset("0") /> <safety_controller soft_lower_limit("0") ... ... soft_upper_limit("0") k_position("0") k_velocity("0") /> </joint> </robot>
†Требуемый для <joint> элементы type prismatic и revolute только.
Как пример, создайте модель URDF двойного маятника. В вашем предпочтительном текстовом редакторе создайте файл с кодом, показанным ниже, и сохраните файл как double_pendulum.urdf в удобной папке. Включайте расширение файла в имя файла. Отдельный пример показывает, как импортировать эту модель в среду Simscape Multibody (см. Импорт Простая Модель URDF).
<robot name = "linkage"> <!-- links section -->> <link name = "link A"> <inertial> <origin xyz = "0 0 0" /> <mass value = "0.5" /> <inertia ixx = "0.5" iyy = "0.5" izz = "0.5" ixy = "0" ixz = "0" iyz = "0" /> </inertial> <visual> <origin xyz = "0 0 0" /> <geometry> <box size = "0.5 0.5 0.1" /> </geometry> <material name = "gray A"> <color rgba = "0.1 0.1 0.1 1" /> </material> </visual> </link> <link name = "link B"> <inertial> <origin xyz = "0 0 -0.5" /> <mass value = "0.5" /> <inertia ixx = "0.5" iyy = "0.5" izz = "0.5" ixy = "0" ixz = "0" iyz = "0" /> </inertial> <visual> <origin xyz = "0 0 -0.5" /> <geometry> <cylinder radius = "0.05" length = "1" /> </geometry> <material name = "gray B"> <color rgba = "0.3 0.3 0.3 1" /> </material> </visual> </link> <link name = "link C"> <inertial> <origin xyz = "0 0 -0.5" /> <mass value = "0.5" /> <inertia ixx = "0.5" iyy = "0.5" izz = "0.5" ixy = "0" ixz = "0" iyz = "0" /> </inertial> <visual> <origin xyz = "0 0 -0.5" /> <geometry> <cylinder radius = "0.05" length = "1" /> </geometry> <material name = "gray C"> <color rgba = "0.5 0.5 0.5 1" /> </material> </visual> </link> <!-- joints section -->> <joint name = "joint A" type = "continuous"> <parent link = "link A" /> <child link = "link B" /> <origin xyz = "0 0 -0.05" /> <axis xyz = "0 1 0" /> </joint> <joint name = "joint B" type = "continuous"> <parent link = "link B" /> <child link = "link C" /> <origin xyz = "0 0 -1" /> <axis xyz = "0 1 0" /> <dynamics damping ="0.002" /> </joint> </robot>
Код задает модель мультитела под названием linkage. Модель содержит три ссылки, названные link A, link B и link C, то подключение через два соединения, названные joint A и joint B. <parent> и <child> элементы соединений идентифицируют, как ссылки соединяются друг с другом: link A подключения к link B и link B подключения к link C. link A не имеет никакой родительской ссылки — то есть, это появляется в <joint> элементами как дочерний элемент только — и является поэтому корневая ссылка.
<inertial> элемент link A задает массу и моменты инерции (ixx, iyy, izz) из ссылки. Продукты инерции (ixy, ixz, и iyz) не заданы и имеют значение, равное нулю URDF. visual элемент link A задает тип геометрии и существенный цвет для использования в визуализации модели. Геометрия в этом случае является полем с шириной и толщиной 0.5 m и высота 0.1 m. <origin> элементы ссылки <inertial> и <visual> задайте преобразования от системы координат ссылки до инерционных и визуальных систем координат. Подобные элементы применяются к link B и link C.
type атрибут <joint> элементы задают соединения как непрерывные — тип шарнирного соединения без пределов движения. <origin> элемент задает местоположение соединения относительно системы координат элемента родительской ссылки. Например, <origin> элемент joint A возмещает объединенный 0.05 m вдоль -Z ось относительно источника link A система координат. axis элемент вкладывается в каждом joint элемент задает вращательную ось соединения как Декартов векторный [0, 1, 0], или +Y.
Рисунок показывает компоненты модели — ссылки и соединения — и различных систем координат, которые они содержат. R обозначает систему координат ссылки, я ссылка инерционная система координат, и V ссылка визуальная система координат. J обозначает объединенную систему координат — по определению сохраненный совпадающим системой координат дочерней ссылки. Инерционные и визуальные системы координат возмещены к центрам ссылок и объединенных систем координат к их более низким ребрам.
Компоненты модели двойного маятника
![]()
Вы можете, но обычно не имеете к, вручную создаете свои собственные файлы URDF. Для более сложных моделей может быть предпочтительно получить файлы URDF из других источников. Производители робототехники и консультанты часто предоставляют модели URDF для своих автоматизированных систем. Приложения CAD, такие как SolidWorks® и PTC® Creo™ поддерживают средства экспорта URDF, которые преобразуют ваши блоки CAD в модели URDF. Рассмотрите эти возможности при работе с комплексными моделями робототехники, которые не могут быть просты создать вручную.
