Реализуйте машина постоянного электромагнита или поле раны
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
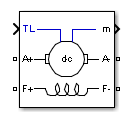
Блок DC Machine реализует машину постоянного тока с обмоткой возбуждения или с постоянными магнитами.
Для машины DC поля раны доступ предоставляется полевым терминалам (F +, F−) так, чтобы модель машины могла использоваться в качестве соединенного с шунтом или подключенной последовательно машины DC. Крутящий момент применился к валу, обеспечивается в Simulink® вход TL.
Схема арматуры (+, A−) состоит из индуктора La и Ра резистора последовательно с противоэлектродвижущей силой (CEMF) E.
CEMF пропорционален скорости машины.
E = KEω
KE является постоянным напряжением, и ω является скоростью машины.
В отдельно взволнованной модели машины DC напряжение постоянный KE пропорционален полю текущий If:
KE = L afIf,
AF L является полевой арматурой взаимная индуктивность.
Электромеханический крутящий момент, разработанный машиной DC, пропорционален току якоря Ia.
Te = KTIa,
KT является постоянным крутящим моментом. Соглашение знака для Te и TL:
Te , TL> 0: Моторный режим
Te, TL <0: режим Generator
Постоянный крутящий момент равен постоянному напряжению.
KT = KE.
Схема арматуры соединяется между + и порты A− блока DC Machine. Это представлено ветвью серии Ra La последовательно с Управляемым Источником Напряжения и блоком Current Measurement.
В модели машины DC поля раны цепь возбуждения представлена схемой RL. Это соединяется между портами F + и F− блока DC Machine.
В модели машины постоянного электромагнита нет никакого поля, текущего, когда поток возбуждения устанавливается магнитами. KE и KT являются константами.
Механическая деталь вычисляет скорость машины DC от крутящего момента привода, применился к ротору. Скорость используется, чтобы реализовать напряжение CEMF E схемы арматуры.
Механическая деталь реализует это уравнение:
J = инерция, Bm = коэффициент вязкого трения и Tf = крутящий момент трения Кулона.
Обеспечивает набор предопределенных электрических и механических параметров для различных оценок машины DC степени (HP), напряжение постоянного тока (V), оцененная скорость (об/мин) и полевое напряжение (V).
Предварительно установленные модели доступны только для модели машины DC поля раны.
Выберите одну из предварительно установленных моделей, чтобы загрузить соответствующие электрические и механические параметры в записях диалогового окна. Выберите No (значение по умолчанию), если вы не хотите использовать предварительно установленную модель, или если вы хотите изменить некоторые параметры предварительно установленной модели.
Когда вы выбираете предварительно установленную модель, электрические и механические параметры во вкладке Parameters диалогового окна становятся немодифицируемыми (недоступный). Начать с данной предварительно установленной модели и затем изменить параметры машины:
Выберите предварительно установленную модель, что вы хотите инициализировать параметры.
Измените значение параметров Preset model в No. Это не изменяет параметры машины. Путем выполнения так, вы повреждаете связь с конкретной предварительно установленной моделью.
Измените параметры машины, как вы хотите, затем нажмите Apply.
Выберите крутящий момент, приложенный к валу, или скорость ротора в качестве входных данных Simulink блока, или представьте вал машины с помощью вращающегося механического порта Simscape ™.
Выберите Torque TL (значение по умолчанию), чтобы задать вход крутящего момента, в N.m и маркировке изменения входа блока к TL. Скорость машины определяется Инерцией машины J и различием между прикладным механическим крутящим моментом нагрузки TL и внутренним электромагнитным крутящим моментом Те. Соглашение знака для механического крутящего момента: когда скорость положительна, положительный сигнал крутящего момента указывает на моторный режим, и отрицательный сигнал указывает на режим генератора.
Выберите Speed w задавать вход скорости, в rad/s и маркировке изменения входа блока к w. Скорость машины наложена, и механическая деталь модели (Инерция J) проигнорирована. Используя скорость, когда механический вход позволяет моделировать механическое устройство, связывающееся между двумя машинами.
Следующая фигура указывает, как смоделировать жесткое соединение вала в моторном генераторе. Скорость выход машины 1 (двигатель) соединяется с входом скорости машины 2 (генератор), в то время как машина 2 электромагнитных крутящих момента вывели Те, применяется к механическому входу TL крутящего момента нагрузки машины 1. Фактор Kw учитывает единицы скорости обеих машин (rad/s) и отношения коробки передач. Фактор KT учитывает модули крутящего момента обеих машин оценок машины и (N.m). Кроме того, как инерция J2 проигнорирован в машине 2, J2 упомянул машину, 1 скорость должна быть добавлена, чтобы обработать 1 инерцию машинным способом J1.
Выберите Mechanical rotational port добавить в блок порт вращательного механического устройства Simscape, который позволяет связь вала машины с другими блоками Simscape, имеющими порты вращательного механического устройства. Вход Simulink, представляющий механический крутящий момент TL или скорость w машины, затем удален из блока.
Следующая фигура указывает, как соединить Идеальный Исходный блок Крутящего момента с библиотеки Simscape на вал машины, чтобы представлять машину в моторном режиме, или в режиме генератора, когда скорость ротора положительна.
Выберите между полем раны и машиной постоянного электромагнита. Выбором является Wound (значение по умолчанию) и Permanent magnet.
Когда этот флажок устанавливается, измерение, выход использует имена сигнала, чтобы идентифицировать метки шины. Выберите эту опцию для приложений, которые требуют, чтобы метка сигнала шины имела только алфавитно-цифровые символы.
Когда этот флажок снимается (значение по умолчанию), измерение, выход использует определение сигнала, чтобы идентифицировать метки шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Ра сопротивления якоря, в Омах и индуктивности якоря La, в Генри. Значением по умолчанию является [ 0.6 0.012].
Полевое сопротивление Rf, в Омах и полевой индуктивности Lf, в Генри. Этот параметр отображается только, когда параметр Field type на вкладке Configuration устанавливается на Wound. Значением по умолчанию является [ 240 120].
Полевая арматура взаимная индуктивность, в Генри. Этот параметр отображается только, когда параметр Field type на вкладке Configuration устанавливается на Wound. Значением по умолчанию является 1.8.
Для машины постоянного электромагнита выберите машину, постоянную, который вы хотите задать для параметризации блока. Значениями является Torque constant (значение по умолчанию) и Back-emf constant. Этот параметр отображается только, когда параметр Field type на вкладке Configuration устанавливается на Permanent magnet.
Крутящий момент на текущую константу машины постоянного электромагнита, в N.m/A. Этот параметр только отображается, когда параметр Field type на вкладке Configuration устанавливается на Permanent magnet и параметр Specify выше устанавливается на Torque constant. Значением по умолчанию является 1.8.
Напряжение на скорость, постоянную из машины постоянного электромагнита, в V/rpm. Этот параметр только отображается, когда параметр Field type на вкладке Configuration устанавливается на Permanent magnet и параметр Specify выше устанавливается на Back-emf constant. Значением по умолчанию является 1.8.
Общая инерция машины DC, в kg.m2. Значением по умолчанию является 1.
Общий коэффициент трения машины DC, в N.m.s. Значением по умолчанию является 0.
Общий крутящий момент трения Кулона, постоянный из машины DC, в N.m. Значением по умолчанию является 0.
Задает начальную скорость для машины DC, в rad/s, для того, чтобы начать симуляцию с определенной начальной скорости. Чтобы запустить симуляцию в устойчивом состоянии, начальное значение входного крутящего момента сигнализирует, что TL должен быть пропорционален начальной скорости. Значением по умолчанию является 1.
Задает шаг расчета, который использует блок. Чтобы наследовать шаг расчета, заданный в блоке Powergui, установите этот параметр на −1 (значение по умолчанию).
TLВход блока является механическим крутящим моментом нагрузки в N.m.
wАльтернативный вход блока (в зависимости от значения параметра Mechanical input) является скоростью машины в rad/s.
mВыход блока является вектором, содержащим сигналы измерения. Можно демультиплексировать эти сигналы при помощи блока Селектора Шины, обеспеченного в Библиотеке Simulink.
Имя | Определение | Модули |
|---|---|---|
w | Скорость wm | рад/с |
iA | Ia тока якоря | A |
если | Поле, текущее, если | A |
Te | Электрический крутящий момент Те | N.m |
power_dcmotor пример иллюстрирует запуск 5 машин DC HP 240 V с начинающим сопротивления с тремя шагами.
[1] Анализ Электрического Машинного оборудования, Краузе и др., стр 89–92.
Asynchronous Machine, Synchronous Machine SI Fundamental, Synchronous Machine pu Fundamental, Synchronous Machine pu Standard
