Дискретное время наблюдатель Luenberger
Simscape / Электрический / Управление / Наблюдатели
Блок Luenberger Observer реализует дискретное время наблюдатель Luenberger. Используйте этот блок, чтобы оценить состояния заметного системного использования:
Дискретные вводы и выводы системы.
Дискретное представление пространства состояний системы.
Наблюдатель Luenberger также иногда упоминается как наблюдатель состояния или просто наблюдатель.
Можно управлять мультивходом, мультивывести системы путем передачи вектора состояния вывода из этого блока с блоком State Feedback Controller.
Блок реализует дискретное время Наблюдатель Luenberger, использующий обратный Метод Эйлера из-за его простоты и устойчивости.
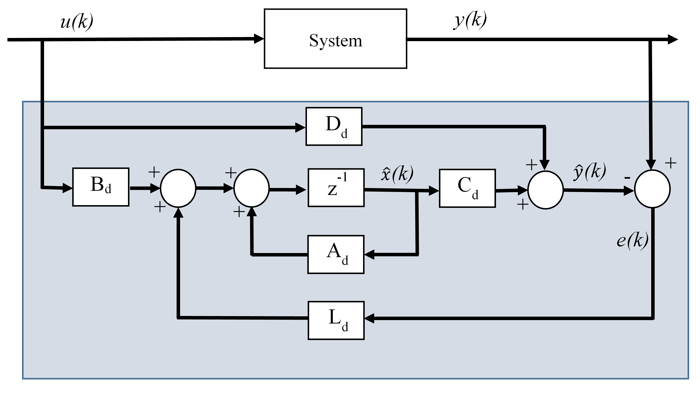
Средство оценки дано этим разностным уравнением:
где:
kth предполагаемый вектор состояния.
kth предполагаемый выходной вектор.
u(k) является kth входной вектор.
y(k) является kth измеренный выходной вектор.
Ad является дискретизированной матрицей состояния.
Bd является дискретизированной входной матрицей.
Ld является дискретизированной матрицей усиления наблюдателя.
Движущие силы ошибки расчета описаны:
где:
e(k) является kth вектор ошибок.
Cd является выходной матрицей.
Ошибка расчета сходится, чтобы обнулить, когда Ad-LdCd имеет свои собственные значения в модульном кругу. Поэтому значение Ld должно быть таково, что эта цель достигается. Блок вычисляет усиление наблюдателя путем решения
где G является произвольной матрицей, и X получен путем решения уравнения Сильвестра:
Здесь, Λ является матрицей с желаемыми собственными значениями, которые являются различные как собственные значения Ad. Эта схема показывает базовую структуру дискретного времени Наблюдатель Luenberger.
Система заметна, который верен, если состояние системы может быть определено из ввода и вывода в конечный промежуток времени. Математически, это означает, что системная матрица наблюдаемости имеет полный ранг.
Желаемые собственные значения различные как собственные значения модели разомкнутого контура.
[1] Luenberger, D. G. "Введение в Наблюдателей". Транзакции IEEE на Автоматическом управлении. Издание 16, Номер 6, 1971, стр 596-602.
[2] Alessandri, A. и П. Колетта. "Проект наблюдателей Luenberger для класса гибридных линейных систем". На Международном семинаре на Гибридных системах: Расчет и Управление, Берлин, март 2001.
[3] Varga, A. "Устойчивое присвоение полюса через Сильвестра основанная на уравнении параметризация обратной связи состояния". В Автоматизированном Проекте Системы управления, стр 13-18., Анкоридж, Аляска, 2000.



