Пьезоэлектрический биморфный луч прямоугольного поперечного сечения
Simscape / Электрический / Электромеханический / Мехатронные Приводы
Блок Piezo Bender моделирует piezoeletric биморфный луч прямоугольного поперечного сечения.
piezo гибочный станок является пьезоэлектрическим устройством, которое изгибается, когда вы применяете электрический потенциал между его пластинами. С другой стороны, когда piezo гибочный станок изгибается, он генерирует электрический потенциал.
piezo гибочный станок включает различные прямоугольные слои piezoelectic материала с перпендикуляром поляризации к стеку. Эта поляризация чередуется в каждом слое.
Этот рисунок показывает декартову систему координат
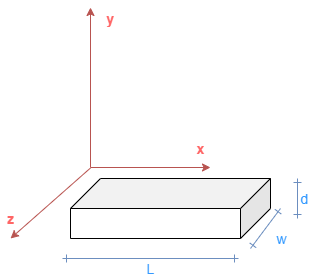
где:
L является длиной луча.
w является шириной луча.
d является толщиной луча.
Это конститутивные уравнения для пьезоэлектрического материала в формулировке заряда напряжения,
| (1) |
| (2) |
где:
T является полем напряжения.
[c] является тензором податливости.
S является полем деформации.
[e] является содействующим тензором напряжения piezo.
E является электрическим полем.
D является электрическим полем смещения.
[ϵS] тензор проницаемости в постоянной или нулевой деформации.
Чтобы смоделировать гибкость, блок использует уравнения луча конечного элемента Эйлера-Бернулли. Перевод и вращение каждого поперечного сечения луча в функции x - ось определяют кинематику луча.
Этот блок считает только силы примененными в направлении y, и пьезоэлектрический материал поляризован, чтобы изогнуться только в плоскости x-y. Поэтому, чтобы описать кинематику, только необходимо определить вертикальное перемещение в направлении y центра тяжести каждого поперечного сечения, y(x) и вращения вокруг z - ось каждого поперечного сечения, φz(x).
От предыдущих предположений поле деформации в луче Эйлера-Бернулли, удовлетворяющем изгибу, равно:
| (3) |
Поскольку электрическое поле является постоянным между положительными и отрицательными пластинами, , блок заменяет уравнением 3 в уравнение 1:
В этом уравнении E = c11 является модулем Янга материала, и e31 (3,1) пьезоэлектрический коэффициент связи заряда напряжения, .
Это уравнение задает изгибающий момент от поля напряжения:
Поскольку поляризация материала для противоположное, чем поляризация для , (3,1) пьезоэлектрический коэффициент связи заряда напряжения изменяет знак, и изгибающий момент задан
где второй момент области прямоугольного поперечного сечения.
В этом уравнении первый термин является классическим уравнением луча, удовлетворяющего изгибу, и второй термин является электромеханической связью из-за присутствия напряжения через пьезоэлектрический материал. Это напряжение производит универсальный электрический изгибающий момент, загруженный вдоль луча.
Блок затем заменяет уравнением 3 в уравнение 2:
Электрический заряд в объеме равен интегралу Гаусса электрического смещения:
Затем это уравнение задает заряд, накопленный между двумя разделами луча из-за пьезоэлектрического эффекта:
Наконец, с механической точки зрения, можно смоделировать piezo гибочный станок как луч Эйлера-Бернулли, загруженный с универсальным крутящим моментом, который пропорционален напряжению:
С электрической точки зрения можно смоделировать piezo гибочный станок как конденсатор с источником заряда, пропорциональным изгибающемуся углу:
Чтобы дискретизировать и решить уравнения Euler-Bernoulli с пьезоэлектрической связью, блок Piezo Bender использует метод конечных элементов.
Блок дискретизирует piezo луч гибочного станка во многие срезы в направлении длины с той же шириной, w, и толщиной, d. Длина каждого элемента равна общей длине луча, разделенного на число элементов, .
Эта матрица жесткости конечного элемента луча Эйлера-Бернулли задает отношение между вертикальным смещением и вращательным углом каждого конца элемента луча и соответствующими силами и моменты из-за эластичности луча:
Затем чтобы получить уравнения для piezo элемента луча гибочного станка, добавьте связывающиеся термины и большую матрицу для инерции:
Наконец, это - уравнение для piezo элемента луча гибочного станка с затуханием:
где:
l является длиной элемента.
w является шириной элемента.
d является толщиной элемента.
второй момент области.
E является модулем Янга.
m = ρlwd является массой элемента, где ρ является массовой плотностью.
e31 (3,1) пьезоэлектрический коэффициент связи заряда напряжения, .
ε является электрической проницаемостью.
матрица затухания.
bm является коэффициентом демпфирования Рейли, пропорциональным массе.
bk является коэффициентом демпфирования Рейли, пропорциональным жесткости.
матрица конечного элемента жесткости.
большая матрица.
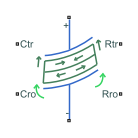
yC является отклонением вдоль y - ось лево-конца элемента.
yR является отклонением вдоль y - ось правильного конца элемента.
φC является вращением вокруг z - ось лево-конца элемента.
φR является вращением вокруг z - ось правильного конца элемента.
FC является силой вдоль y - ось лево-конца элемента.
FR является силой вдоль y - ось правильного конца элемента.
TC является крутящим моментом в z - ось лево-конца элемента.
TR является крутящим моментом в z - ось правильного конца элемента.
v является напряжением через верхние и нижние электроды.
q является накопленным зарядом между электродами и пьезоэлектрическим материалом.
Таблица данных piezo гибочного станка обычно обеспечивает эти данные:
Размерности (l, w, d)
Масса, m
Номинальное напряжение, vrated
Свободное отклонение в номинальном напряжении, yfree
Блокируя силу в номинальном напряжении, Fblock
Емкость, Cpiezo
Сначала резонансная частота, f1
Возможно вычислить основные материальные параметры piezo гибочного станка при помощи параметров таблицы данных.
Во-первых, блок решает отношения отклонения силы напряжения от установившихся уравнений без крутящего момента, примененного и зафиксированного - свободная настройка:
Эти уравнения задают отношение между отклонением совета, напряжением и снабжают подсказкой силу:
Блок вычисляет емкость путем принятия нулевой приложенной силы:
Наконец, это уравнение показывает отношение между плотностью и массой:
Если вы задали все отношения между основным принципом и параметрами таблицы данных, можно вычислить основные параметры этими уравнениями:
Затем замените этими уравнениями в конститутивных уравнениях:
Можно вычислить первую резонансную частоту зафиксированного - свободный луч универсального сечения при помощи этого уравнения:
Блок затем параметрирует динамику непосредственно путем определения желаемой собственной частоты.
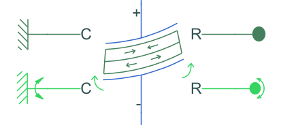
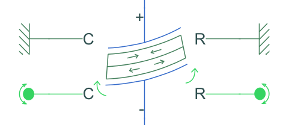
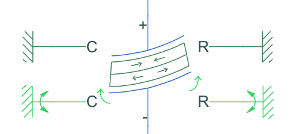
Лучи имеют различные граничные условия в своих левых и правых концах:
Свободный — И смещение и вращение равны любому значению.
Просто поддерживаемый — смещение равно 0.
Зафиксированный — И смещение и вращение равны 0.
Эта таблица показывает возможные граничные настройки для piezo луча гибочного станка.
| Configuration | Модель |
|---|---|
| Зафиксированный - свободный |
|
| Поддерживаемый - поддерживаемый |
|
| Зафиксированный - зафиксированный |
|
[1] Tadmor, E. B. и Г. Коса. "Электромеханическая Коррекция Связи для Пьезоэлектрических Многоуровневых Лучей". Журнал Микроэлектромеханических Систем, издания 12, № 6, декабрь 2003, стр 899–906. DOI.org (Crossref), doi:10.1109/JMEMS.2003.820286.
[2] Benjeddou A, MA Trindade, Охайон Р. "Объединенная Модель Конечного элемента Луча для Расширения и Сдвига Пьезоэлектрические Механизмы Приведения в действие". Журнал Интеллектуальных Материальных Систем и Структур. 1997; 8 (12):1012-1025. doi:10.1177/1045389X9700801202
[3] Гэвин, Анри П. "Элемент луча матрицы Stiffness". Центральная и Восточная Европа 421L. Матричный структурный анализ. Университет Дюка, 2014.