Упрощенная синхронная машина с электродвижущей силой
Simscape / Электрический / Электромеханический / Синхронный
Блок Simplified Synchronous Machine моделирует упрощенную синхронную машину с источником напряжения, который представляет электродвижущую силу (EMF). Можно задать внутреннее сопротивление и индуктивность параметрами SI или на модуль.
Эквивалентные схемы упрощенной синхронной машины для прямой оси, квадратурной оси и нулевой последовательности:
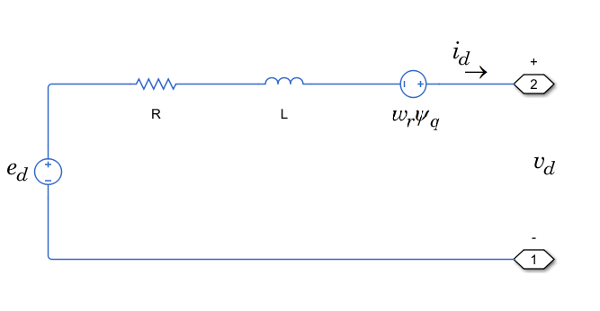
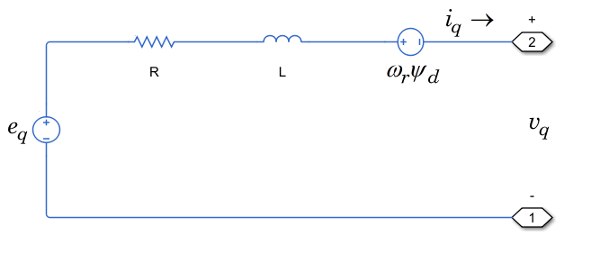
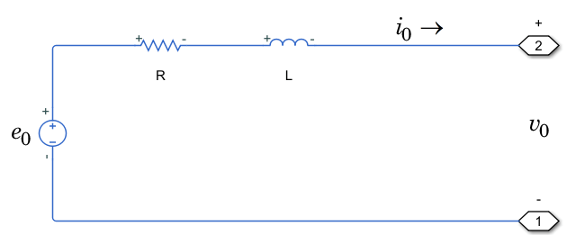
Упрощенные синхронные уравнения машины описываются относительно вращающейся системы координат, которая задана:
где:
θe является электрическим углом.
N является количеством пар полюса.
θr является углом ротора.
Преобразование Парка сопоставляет синхронные уравнения машины с вращающейся системой координат относительно электрического угла. Преобразование Парка задано:
Преобразование Парка используется, чтобы определить упрощенные синхронные уравнения машины на модуль. Уравнения напряжения определены:
где:
ed, eq и e0 является d - ось, q - ось и напряжения нулевой последовательности, заданные:
ea, eb и ec являются внутренними источниками напряжения на модуль, заданными:
epu является амплитудой на модуль внутреннего сгенерированного напряжения.
vd, vq и v0 заданы:
va, vb и vc являются напряжениями статора, измеренными от порта ~ до нейтрального порта n.
ωbase является основной электрической скоростью на модуль.
ψd, ψq и ψ0 является d - ось, q - ось и потокосцепления нулевой последовательности.
ωr является скоростью вращения ротора на модуль.
R является сопротивлением статора.
id, iq и i0 является d - ось, q - ось и токи статора нулевой последовательности, заданные:
ia, ib и ic являются токами статора, вытекающими из порта ~.
Уравнения потокосцепления статора определены
где L является индуктивностью утечки статора.
Уравнение мощности упрощенной синхронной машины, в относительных единицах, задано:
Блок имеет четыре дополнительных тепловых порта, скрытые по умолчанию. Чтобы осушить тепловые порты, щелкните правой кнопкой по блоку по своей модели, и затем из контекстного меню выбирают Simscape> Block choices> Show thermal port. Это действие отображает тепловые порты HA, HB, HC и HR на значке блока, и отсоединяет параметры Thermal Port.
Используйте тепловой порт, чтобы симулировать эффекты выработанного тепла и температуры машины. Для получения дополнительной информации об использовании тепловых портов и на параметрах Thermal, смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
