Код быстрого прототипирования задает следующие функции, которые взаимодействуют через интерфейс с основной программой (main.c или main.cpp):
Model(): Регистрационная функция модели. Эта функция инициализирует рабочие области (например, выделяя и устанавливая указатели на различные структуры данных) используемый моделью. Регистрационные вызовы функции модели MdlInitializeSizes и MdlInitializeSampleTimes функции. Эти две функции очень похожи на S-функцию mdlInitializeSizes и mdlInitializeSampleTimes методы.
MdlStart(void): После регистрационных функций модели MdlInitializeSizes и MdlInitializeSampleTimes выполнитесь, основная программа запускает выполнение путем вызова MdlStart. Эта стандартная программа называется однажды при запуске.
Функция MdlStart имеет четыре основных раздела:
Код, чтобы инициализировать состояния для каждого блока в корневой модели, которая имеет состояния. Вызов подпрограммы сделан к, “инициализируют состояния” стандартные программы условно выполняемых подсистем.
Код, сгенерированный одноразовой инициализацией, (запускает) функцию для каждого блока в модели.
Код, чтобы включить блоки в корневой модели, которые имеют, включает методы и блоки, внутри инициированные или подсистемы вызова функций, находящиеся в корневой модели. Simulink® блоки могут иметь, включают и отключают методы. Разрешать метод называется непосредственно перед тем, как блок начинает выполняться, и запрещать метод называется сразу после того, как блок прекращает выполняться.
Код для каждого блока в модели, выходное значение которой является постоянным. Блочный код появляется в MdlStart функционируйте, только если параметры блоков не являются настраиваемыми в сгенерированном коде и если генератор кода не может устранить блочный код посредством сворачивания констант.
MdlOutputs(int_T tid): MdlOutputs обновляет выход блоков. tid (идентификатор задачи) параметр идентифицирует задачу, которая в свою очередь сопоставляет, когда выполнить блоки, основанные на их шаге расчета. Эта стандартная программа вызывается основной программой во время главных и незначительных временных шагов. Главные временные шаги - когда основная программа берет фактический временной шаг (то есть, пора выполнить определенную задачу). Если ваша модель будет содержать непрерывные состояния, незначительные временные шаги будут взяты. Незначительные временные шаги - когда решатель генерирует этапы интегрирования, которые являются точками между основными выходными параметрами. Эти этапы интегрирования используются для расчета производные, используемые в усовершенствовании непрерывных состояний.
MdlUpdate(int_T tid): MdlUpdate обновляет состояния, и работайте векторная информация состояния (то есть, состояния, которые не непрерывны и не дискретны), сохраненный в векторах работы. tid (идентификатор задачи) параметр идентифицирует задачу, которая в свою очередь указывает, какие шаги расчета активны, позволяя вам условно обновить только состояния активных блоков. Эта стандартная программа вызывается интерфейсом после майора MdlOutputs был выполнен. Решатель также называется, и model_Derivatives
MdlTerminate(void): MdlTerminate содержит любой код завершения работы блока. MdlTerminate вызван интерфейсом, как часть завершения программы в реальном времени.
Содержимое вышеупомянутых функций непосредственно связано с блоками в вашей модели. Блок Simulink может быть обобщен к следующей системе уравнений.
Выходной y является функцией непрерывного состояния xc, дискретное состояние xd и вход u. Каждый блок написал свое определенное уравнение в разделе MdlOutputs.
Дискретные состояния xd являются функцией текущего состояния и входа. Каждый блок, который имеет дискретное состояние, обновляет свое состояние в MdlUpdate.
Производные x являются функцией текущего входа. Каждый блок, который имеет непрерывные состояния, предоставляет свои производные решателю (например, ode5\in model_Derivatives
Выход, y, обычно пишется в структуру блока I/O. Блоки Выходного порта корневого уровня пишут во внешнюю выходную структуру. Непрерывные и дискретные состояния хранятся в структуре состояний. Вход, u, может произойти из выхода другого блока, который расположен в структуре блока I/O, внешний вход (расположенный во внешней входной структуре), или состояние. Эти структуры заданы в modelH
Следующий пример показывает общее содержимое стиля быстрого прототипирования кода С, записанного в modelC
Этот рисунок показывает блок-схему, описывающую выполнение сгенерированного кода быстрого прототипирования.
Блок-схема выполнения быстрого прототипирования
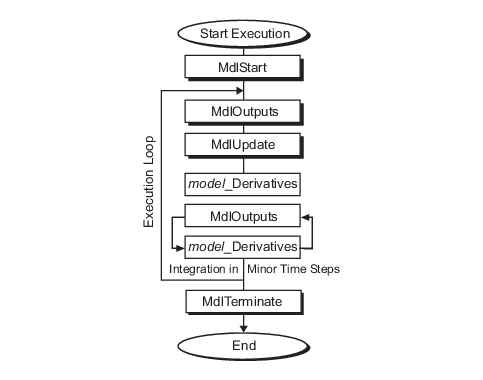
Каждый блок помещает код в определенный Mdl стандартные программы согласно алгоритму, который это реализует. Блоки ввели, вывели, параметры, и состояния, а также другие общие элементы. Например, в целом, блокируйтесь, вводы и выводы записаны в структуру блока I/O (modelBmodelUmodelXrtGround) если несвязанный или основанный. Блокируйтесь выходные параметры могут также перейти к внешней структуре output (modelY
Представление данных сгенерированного кода
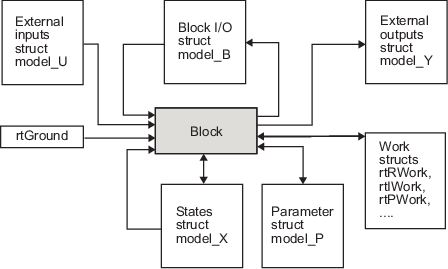
Следующий список задает структуры, показанные на предыдущем рисунке:
Блокируйте структуру ввода-вывода (modelBmodelB
Многократное использование записей в modelB
Создание других локальных переменных записей
Смотрите Как Хранилища Сгенерированного кода Внутренний Сигнал, состояние и Данные о Параметре для получения дополнительной информации об этой оптимизации.
Имена полей структуры определяются любой именем выходного сигнала блока (когда существующий) или именем блока и номером порта, когда выходной сигнал оставляют непомеченным.
Структуры состояний блока: непрерывная структура состояний (modelXDWork vector (model_DWork)
Структура параметров блоков (modelP
Внешняя входная структура (modelU
Внешняя выходная структура (modelY
Действительная работа, целочисленная работа и указатель работают структуры (model_RWorkmodel_IWorkmodel_PWork
