Используйте Simulink® Code Inspector™, чтобы проверить, что код, сгенерированный из модели Simulink, структурно эквивалентен исходной модели. Simulink Code Inspector систематически сравнивает блоки, диаграммы состояний, параметры и настройки в модели, чтобы определить, эквивалентны ли они функционально операциям, операторам и данным в сгенерированном коде. Путем представления отчетов инспекции кода сертифицирующим органам можно удовлетворить целям рассмотрения кода в DO-178. Можно также сгенерировать матрицу трассируемости, если вы используете Windows® платформа.
Из-за несовместимостей модели с Simulink Code Inspector вы можете получить неполный отказ верификации или верификации. Чтобы избежать этой проблемы, Simulink Code Inspector имеет функциональность проверки совместимости, которую можно использовать, чтобы обнаружить несовместимости модели рано на шаге подготовки модели.
Чтобы завершить этот пример, вы должны иметь:
Embedded Coder®
Simulink Code Inspector
Этот пример использует модель slcidemo_roll_orig в качестве примера.
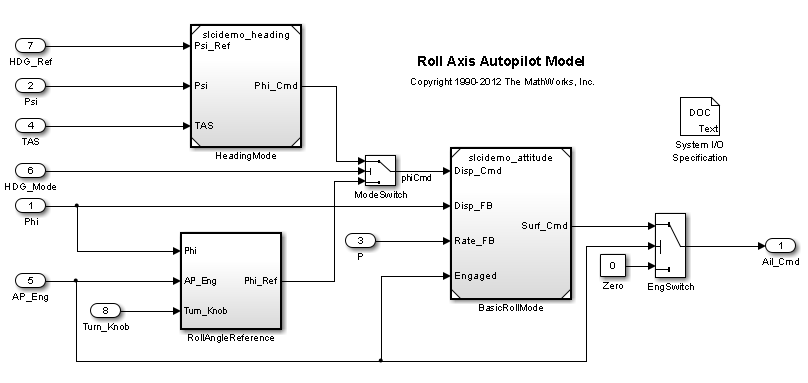
Это - схема верхнего уровня модели. Это представляет основной автопилот продольной оси двумя рабочими режимами: прокрутитесь отношение содержат, и заголовок содержат. Логика режима для этих режимов является внешней к этой модели. Архитектура модели представляет заголовок, содержат режим и основную функцию отношения крена как модели, на которые ссылаются. Функция управления ориентацией креном является ПИД-регулятором, который использует отношение крена и обратную связь уровня крена, чтобы произвести команду элерона. Вход контроллеру является или основной ссылкой крена или командой крена, чтобы отследить заголовок. Модель включает:
Атомарная подсистема RollAngleReference, который реализует основное вычисление ссылки крена. Embedded Coder встраивает это вычисление непосредственно в основную функцию для slcidemo_roll.
Блок Model HeadingMode, ссылка на отдельную модель, которая вычисляет команду крена, чтобы отследить заголовок.
Блок Model BasicRollMode, ссылка на отдельную модель, которая вычисляет функцию управления ориентацией креном.
В этом примере вы учитесь как:
Подготовьте свою модель к генерации кода и контролю.
Сгенерируйте код из модели.
Смотрите код и рассмотрите инспекционные результаты.
Сгенерируйте матрица трассируемости и отчеты.
В конце примера существуют ссылки на темы, которые предоставляют больше информации.
Чтобы запустить пример, смотрите, Готовят Модель к Генерации кода и Контролю.
