Simulink® Control Design™ позволяет вам проектировать и анализировать системы управления, смоделированные в Simulink. Вы можете автоматически настроить произвольные SISO и MIMO архитектуры управления, включая ПИД-контроллеры. Автонастройка ПИД-регулятора может быть развернута на встроенном программном обеспечении для автоматического расчета коэффициентов усиления ПИДа в режиме реального времени. Можно также реализовать ищущее экстремум управление без моделей и адаптивное управление моделью - ссылкой для приложений, где контроллер должен адаптироваться к изменяющимся условиям объекта.
Можно найти рабочие точки и вычислить точную линеаризацию моделей Simulink в различных условиях работы. Simulink Control Design обеспечивает инструменты, которые позволяют вам вычислить основанные на симуляции частотные характеристики, не изменяя вашу модель.
Найдите установившиеся рабочие точки, которые выполняют техническим требованиям путем обрезки модели Simulink с помощью Steady State Manager.
Линеаризуйте модель в рабочей точке, заданной в модели. Рабочая точка модели состоит из значений начального состояния модели и входных сигналов.
В этом примере показано, как программно линеаризовать watertank систему управления с обратной связью Модели Simulink.
Оцените частотную характеристику модели Simulink с помощью вручную созданного sinestream входного сигнала.
Можно настроить усиления блоков PID Controller, чтобы достигнуть устойчивого проекта с желаемым временем отклика с помощью PID Tuner.
Автоматически настройте параметры ПИД-регулятора. Можно затем точно настроить эффективность контроллера с помощью методов графического дизайна.
Утверждайте, что характеристики линейной системы удовлетворяют заданным границам с помощью комбинации Simulink Control Design и блоков верификации Simulink.
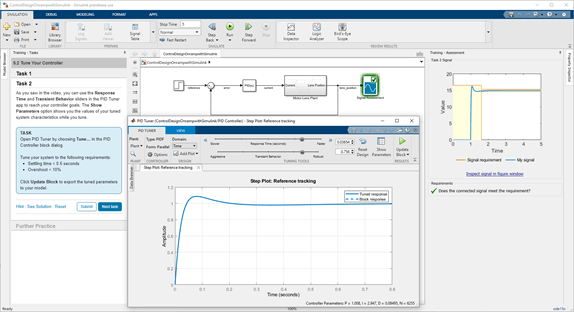
Система управления Onramp с Simulink
Рассчитанный на индивидуальную скорость обучения, интерактивный пример включен с лицензией Simulink Control Design
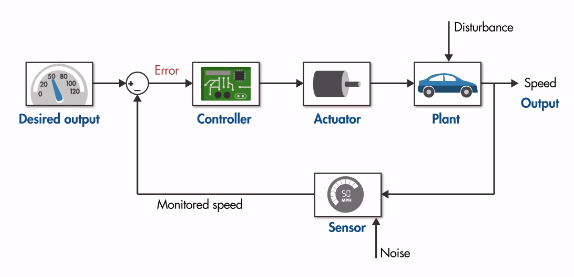
Понимание систем управления — переговоры по технологии MATLAB
Идите через повседневные примеры, которые исследуют основные принципы систем управления с обратной связью и разомкнутого контура.
