Ограничьте перерегулирование в переходном процессе от заданных входных параметров до заданных выходных параметров, при использовании Control System Tuner.
Промахнитесь Цель ограничивает перерегулирование в переходном процессе между заданными местоположениями сигнала. Ограничению удовлетворяют, когда перерегулирование в настроенном ответе меньше целевого перерегулирования
Программное обеспечение сопоставляет максимальное перерегулирование с пиковым ограничением усиления, принимая характеристики системы второго порядка. Поэтому для настройки систем высшего порядка, ограничение перерегулирования является только аппроксимированным. Кроме того, Цель Перерегулирования не может надежно уменьшать перерегулирование ниже 5%.
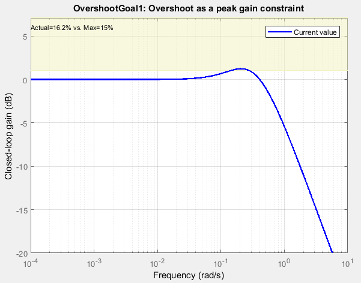
Когда вы создаете настраивающуюся цель в Control System Tuner, целевой настройкой график сгенерирован. Заштрихованная область на графике представляет область в частотном диапазоне, где настраивающейся цели не удовлетворяют.
Во вкладке Tuning Control System Tuner выберите New Goal> Maximum overshoot, чтобы создать Цель Перерегулирования.
При настройке систем управления в командной строке используйте TuningGoal.Overshoot задавать цель переходного процесса.
Используйте этот раздел диалогового окна, чтобы задать вход, выведите, и открывающие цикл местоположения для оценки настраивающейся цели.
Specify step-response inputs
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно применить вход шага. Чтобы ограничить ответ SISO, выберите однозначный входной сигнал. Например, чтобы ограничить переходной процесс от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'u'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Specify step-response outputs
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно измерить ответ на вход шага. Чтобы ограничить ответ SISO, выберите однозначный выходной сигнал. Например, чтобы ограничить переходной процесс от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'y'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или сигнал с векторным знаком. Для систем MIMO количество выходных параметров должно равняться количеству входных параметров.
Evaluate overshoot with the following loops open
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно открыть обратную связь в целях оценки этой настраивающей цели. Настраивающаяся цель оценена против настройки разомкнутого контура, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Например, чтобы оценить настраивающуюся цель с открытием в местоположении под названием 'x', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'x'.
Совет
Подсвечивать любой выбранный сигнал в Simulink® модель, щелкнуть![]() . Чтобы удалить сигнал из списка вводов или выводов, щелкнуть
. Чтобы удалить сигнал из списка вводов или выводов, щелкнуть![]() . Когда вы выбрали несколько сигналов, можно переупорядочить их использование
. Когда вы выбрали несколько сигналов, можно переупорядочить их использование![]() и
и![]() . Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
. Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
Используйте этот раздел диалогового окна, чтобы задать дополнительные характеристики цели перерегулирования.
Limit % overshoot to
Введите максимальное перерегулирование процента. Цель перерегулирования не может надежно уменьшать перерегулирование ниже 5%
Adjust for step amplitude
Для настраивающей цели MIMO, когда выбор модульных результатов в соединении маленьких и больших сигналов в различных каналах ответа, эта опция позволяет вам задавать относительную амплитуду каждой записи во входе шага с векторным знаком. Эта информация используется, чтобы масштабировать недиагональные термины в передаточной функции от ссылки до отслеживания ошибки. Это масштабирование гарантирует, что перекрестные связи измеряются относительно амплитуды каждого опорного сигнала.
Например, предположите, что настройка цели является этим выходные параметры 'y1' and 'y2' отследите опорные сигналы 'r1'and 'r2'. Предположим далее, что вы требуете, чтобы выходные параметры отследили ссылки меньше чем с 10%-й перекрестной связью. Если r1 и r2 имейте сопоставимые амплитуды, затем достаточно сохранить усиления от r1 к y2 и r2 и y1 ниже 0.1. Однако, если r1 в 100 раз больше, чем r2, усиление от r1 к y2 должен быть меньше 0.001, чтобы гарантировать тот r1 изменения y2 меньше чем 10% r2 цель. Чтобы гарантировать этот результат, установите Adjust for step amplitude на Yes. Затем введите [100,1] в текстовом поле Amplitudes of step commands. Выполнение так говорит Control System Tuner учитывать, что первый опорный сигнал в 100 раз больше второго опорного сигнала.
Значение по умолчанию, No , средние значения никакое масштабирование применяются.
Apply goal to
Используйте эту опцию при настройке многоуровневых моделей целиком, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные настраивающие цели осуществляются для всех моделей. Чтобы осуществить настраивающееся требование для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых осуществляется цель. Например, предположите, что вы хотите применить настраивающуюся цель к вторым, третьим, и четвертым моделям в массиве моделей. Чтобы ограничить осуществление требования, введите 2:4 в текстовом поле Only Models.
Для получения дополнительной информации о настройке для многоуровневых моделей, смотрите Устойчивые Настраивающие Подходы (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую настраивающую цель в нормированное скалярное значение f (x). Здесь, x является вектором из свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для Overshoot Goal f (x) отражает относительную удовлетворенность или нарушение цели. Отклонение процента от f (x) = 1 примерно соответствует отклонению процента от заданной цели перерегулирования. Например, f (x) = 1,2 средних значения, фактическое перерегулирование превышает цель примерно на 20% и f (x) = 0,8 средних значения фактическое перерегулирование, является приблизительно на 20% меньше, чем цель.
Использование Overshoot Goal как прокси для перерегулирования, на основе характеристик модели второго порядка. Здесь, T является передаточной функцией с обратной связью, которую ограничивает требование. Перерегулирование настраивается в диапазоне от 5% ( = 1) к 100% (). Overshoot Goal неэффективен при принуждении перерегулирования ниже 5%.
Эта настраивающая цель также налагает неявное ограничение устойчивости на передаточную функцию с обратной связью между заданными входными параметрами к выходным параметрам, оцененным с циклами, открытыми в заданных открывающих цикл местоположениях. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. Minimum decay rate и Maximum natural frequency, настраивающий опции, управляют нижними и верхними границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, на вкладке Tuning, использует Tuning Options, чтобы изменить значения по умолчанию.
