Шпора или планетарный активный дифференциал
Vehicle Dynamics Blockset / Трансмиссия / Ходовая часть / Финал Управляет Модулем
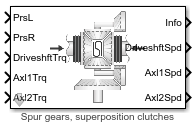
Блок Active Differential реализует активный дифференциал с учетом передачи степени от передачи до осей. Блок моделирует активный дифференциал как открытый дифференциал, связанный или с цилиндрическим или с планетарным набором дифференциала. Блок использует внешние сигналы давления отрегулировать давление муфты, чтобы или убыстриться или замедлить каждое вращение оси.
Используйте блок в оборудовании в цикле (HIL) и рабочих процессах оптимизации, чтобы динамически связать карданный вал с осями колеса, когда это необходимо, чтобы направить крутящий момент передачи к определенной оси. Для подробных передних исследований управления колеса используйте блок, чтобы связать карданный вал с универсальными соединениями. Блок подходит, чтобы использовать в уровне системы исследования управления с обратной связью, например, устойчивость рыскания и векторизацию крутящего момента. Все параметры являются настраиваемыми.
Чтобы задать активный дифференциал, откройте параметры Active Differential и задайте Active differential type.
Установка | Блокируйте реализацию |
|---|---|
Spur gears, superposition clutches | Муфты находятся в суперпозиции через систему механизма с тремя бандами и дифференциальный случай |
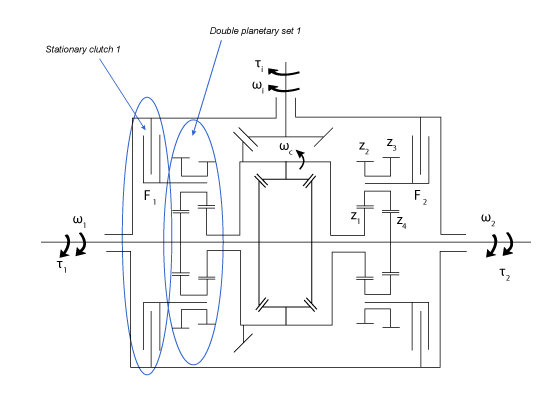
Double planetary gears, stationary clutches | Муфты фиксируются несущей и осям через двойные планетарные наборы механизма |
Используйте параметр Open Differential Crown wheel (ring gear) located, чтобы задать открывать дифференциальное отделение, любого налево или направо от средней линии.
В зависимости от доступных данных, чтобы задать метод, чтобы связать различные крутящие моменты применился к осям, используйте параметр Slip Coupling Coupling type.
Установка | Блокируйте реализацию |
|---|---|
Pre-loaded ideal clutch | Крутящий момент, смоделированный как сухая муфта с постоянными коэффициентами трения |
Slip speed dependent torque data | Крутящий момент определил из интерполяционной таблицы, которая является функцией давления муфты и скорости скольжения |
Блок Active Differential не включает контроллер или внешнюю динамику привода муфты. Используйте эту информацию, чтобы контролировать входное давление муфты. Информационная шина содержит скорости скольжения в муфте 1, Δωcl1 и муфта 2, Δωcl2.
Введите крутящий момент оси | Δωcl1 | Δωcl2 | Введите давление муфты |
|---|---|---|---|
Положительная ось 1 крутящий момент | > 0 | N/A | Увеличьте муфту 1 давление |
Положительная ось 1 крутящий момент | < 0 | N/A | Расцепите муфту 1 и 2 |
Положительная ось 2 крутящих момента | N/A | > 0 | Увеличьте муфту 1 давление |
Положительная ось 2 крутящих момента | N/A | < 0 | Расцепите муфту 1 и 2 |
Блок Active Differential реализует эти уравнения, чтобы представлять механический динамический ответ для суперпозиции и стационарных настроек муфты. Чтобы определить передаточные отношения, блок использует скорость муфты и количество зубов для каждой пары механизма. Допустимое различие в скорости колеса (AWSD) ограничивает различие в скорости колеса для положительного крутящего момента.
Механический динамический ответ | Уравнения | |
|---|---|---|
Муфты суперпозиции и цилиндрический левередж | Стационарные муфты и планетарный левередж | |
Коронуйте механизм |
|
|
Ось 1 |
|
|
Ось 2 |
|
|
Передаточные отношения |
|
|
Ограничения жесткого соединения |
|
|
Допустимое различие в скорости колеса (AWSD) |
|
|
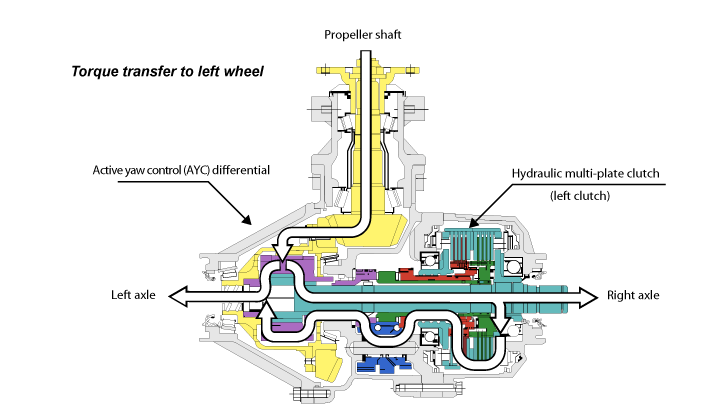
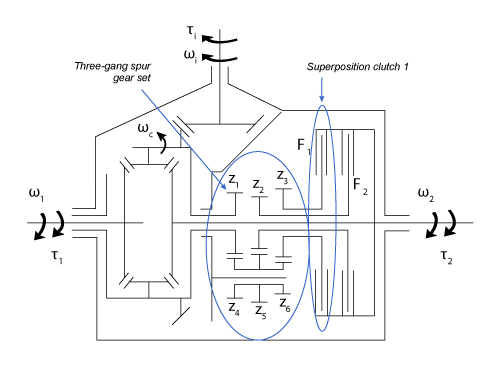
Эти рисунки муфты суперпозиции показывают, что настройка муфты и схематичный для крутящего момента передает левому колесу.
Рисунки показывают стационарную настройку муфты и схематичный.
И для идеальной муфты и для настроек скорости скольжения, связь промаха является функцией давления муфты и скорости скольжения. Скорость скольжения зависит от скорости промаха в каждом из интерфейсов муфты.
Идеальная модель связи муфты использует скорость скольжения оси, давление муфты и трение, чтобы вычислить крутящий момент муфты. Коэффициент трения является функцией скорости скольжения.
Чтобы вычислить общую силу муфты, блок использует эффективный радиус, давление муфты и усилие предварительной нагрузки муфты.
Радиусы диска определяют эффективный радиус муфты, по которому действует сила муфты.
Чтобы вычислить крутящий момент муфты, модель связи скорости скольжения использует данные о крутящем моменте, которые являются функцией давления муфты и скорости скольжения. Скорости вращения осей определяют скорость скольжения.
Уравнения используют эти переменные.
| Aeff | Эффективная область давления муфты |
| bd | Коронуйте механизм линейное вязкое затухание |
| b1, b2 | Ось 1 и 2 линейных вязких затухания, соответственно |
| Fc, FT | Сожмите усилие предварительной нагрузки и общую силу, соответственно |
| Jd | Несущая вращательная инерция |
| Jgc | Механизм с тремя бандами вращательная инерция |
| Jc1, Jc2 | Планетарная несущая 1 и 2 вращательной инерции, соответственно |
| Jr1, Jr2 | Планетарный кольцевой механизм 1 и 2 вращательной инерции, соответственно |
| Js1, Js2 | Планетарный механизм солнца 1 и 2 вращательной инерции, соответственно |
| J1, J2 | Ось 1 и 2 вращательной инерции, соответственно |
| N | Передаточное отношение несущей к карданному валу |
| Nd | Количество дисков |
| Ns1, Ns2 | Сожмите 1 и 2 передаточных отношения несущей к шпоре, соответственно |
| Np1, Np2 | Планетарное 1 и 2 передаточных отношения несущей к оси, соответственно |
| P1, P2 | Сожмите 1 и 2 давления, соответственно |
| Reff | Эффективный радиус муфты |
| Ri, Ro | Кольцевой диск внутренний и внешний радиус, соответственно |
| Tc | Сожмите крутящий момент |
| Tcl1, Tcl2 | Сожмите 1 и 2 связывающихся крутящих момента, соответственно |
| Td | Крутящий момент карданного вала |
| T1, T2 | Ось 1 и 2 крутящих момента, соответственно |
| Ti | Ось внутренний крутящий момент сопротивления |
| Ti1, Ti2 | Ось 1 и 2 внутренних крутящих момента сопротивления |
| ωd | Скорость вращения карданного вала |
| ϖ | Скорость скольжения |
| ω1, ω2 | Ось 1 и 2 скорости вращения, соответственно |
Δωcl1, Δωcl2 | Сожмите 1 и 2 скорости скольжения в интерфейсе, соответственно |
ωcl1, ωcl2 | Сожмите 1 и 2 скорости вращения, соответственно |
| μ | Сожмите коэффициент трения |
| zi | Количество зубов на механизме i |
[1] Deur, J., Ivanović, V., Хэнкок, M. и Assadian, F. "Моделирование Активной Дифференциальной Динамики". В продолжениях ASME. Системы транспортировки. Издание 17, стр: 427-436.
