3DOF твердый кузов, чтобы вычислить продольный, вертикальный, и движение тангажа
Powertrain Blockset / Динамика аппарата
Vehicle Dynamics Blockset / Кузов
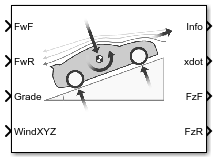
Блок Vehicle Body 3DOF Longitudinal реализует три степени свободы (3DOF) твердая модель кузова с конфигурируемой жесткостью оси, чтобы вычислить продольный, вертикальный, и движение тангажа. Блок составляет массу тела, аэродинамическое перетаскивание, дорожную наклонную поверхность и распределение веса между осями из-за ускорения и дорожного профиля.
Можно задать тип прикрепления оси к транспортному средству:
Градуируйте угол — Вертикальное смещение оси от дорожного покрытия до осей остается постоянным. Блок использует табличную жесткость и параметры затухания, чтобы смоделировать силы приостановки, действующие между кузовом и осями.
Смещение оси — Оси обеспечили входом вертикальное смещение и скорость относительно дорожного класса. Блок использует табличную жесткость и параметры затухания, чтобы смоделировать силы приостановки, действующие между кузовом и осью.
Внешняя приостановка — Оси имеют внешне приложенные силы для связи кузова к пользовательским моделям приостановки.
Если передача веса от вертикального и движений тангажа не незначительна, рассматривает использование этого блока, чтобы представлять движение транспортного средства в исследованиях экономии топлива и трансмиссии. Например, в исследованиях с тяжелым повреждением или ускорением или дорожными профилями, которые содержат большие вертикальные изменения.
Блок использует движение транспортного средства твердого тела, силы системы подвески, и ветер и силу сопротивления, чтобы вычислить нормальные силы на передние и задние оси. Блок разрешает компоненты силы и моменты на твердой системе координат кузова:
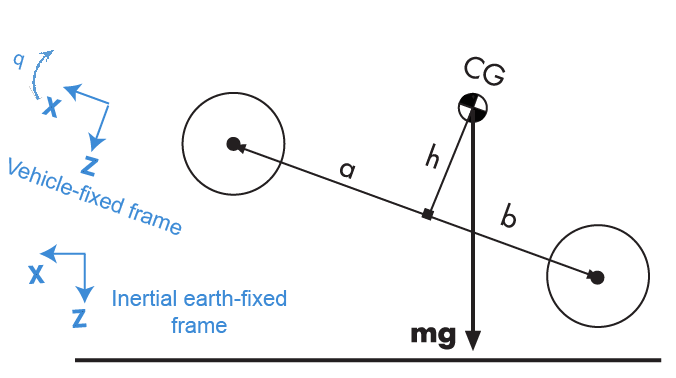
Оси транспортного средства параллельны и формируют плоскость. Продольное направление находится в этой плоскости и перпендикулярно осям. Если транспортное средство перемещается на наклоненном наклоне, нормальное направление не параллельно силе тяжести, но всегда перпендикулярно продольной осью плоскости.
Блок использует результирующий эффект всех сил и крутящих моментов, действующих на него, чтобы определить движение транспортного средства. Продольные силы шины продвигают транспортное средство или назад. Вес транспортного средства действует через его центр тяжести (CG). В зависимости от наклоненного угла вес вытягивает транспортное средство к земле и или вперед или назад. Перемещается ли транспортное средство вперед, или обратное, аэродинамическое перетаскивание замедляет его. Для простоты перетаскивание принято, чтобы действовать через CG.
Vehicle Body 3DOF Longitudinal реализует эти уравнения.
Если вы конфигурируете блок параметром Ground interaction type Grade angle или Axle displacement, velocity, блок использует нелинейную жесткость и параметры затухания, чтобы смоделировать систему подвески.
Силами приостановки передней и задней оси дают:
Блок использует интерполяционные таблицы, чтобы реализовать жесткость передней и задней подвески. С учетом кинематической и существенной нелинейности, включая столкновения с остановками конца, таблицы являются функциями диапазона.
Блок использует интерполяционные таблицы, чтобы реализовать затухание передней и задней подвески. С учетом нелинейности, сжатия и восстановления, таблицы являются функциями штрихового уровня.
Диапазон является различием в вертикальном транспортном средстве и положения оси. Штриховой уровень является различием в вертикальных скоростях и скоростях оси.
Когда параметром Ground interaction type является Grade angle, вертикальные положения оси () и скорости () установлены в 0.
Блок вычитает скорости ветра из скоростных компонентов транспортного средства, чтобы получить сетевую относительную скорость полета. Чтобы вычислить силу сопротивления и моменты, действуя на транспортное средство, блок использует сетевую относительную скорость полета:
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Внешне поданное продольное питание силы | |
| Внешне поданное продольное питание силы | |||
| Внешне поданное питание момента тангажа | |||
| Продольная сила прикладывается в передней оси | |||
| Продольная сила прикладывается в задней оси | |||
|
|
| Внутренняя степень передается между приостановкой и кузовом в передней оси | ||
| Внутренняя степень передается между приостановкой и кузовом в задней оси | |||
| Продольная степень силы сопротивления | |||
| Вертикальная степень силы сопротивления | |||
| Перетащите степень момента тангажа | |||
| Общая степень затухания приостановки | |||
|
|
| Изменение уровня в гравитационной потенциальной энергии | ||
| Скорость изменения продольной кинетической энергии | |||
| Скорость изменения продольной кинетической энергии | |||
| Скорость изменения вращательного тангажа кинетическая энергия | |||
| Сохраненная пружинная энергия от передней подвески | |||
| Сохраненная пружинная энергия от задней подвески | |||
Уравнения используют эти переменные.
| Fx | Продольная сила на транспортном средстве |
| Fz | Нормальная сила на транспортном средстве |
| My | Закрутите на транспортном средстве о зафиксированной транспортным средством оси Y |
| FwF, FwR | Продольная сила на передних и задних осях вдоль зафиксированной транспортным средством оси X |
| Fd,x, Fd,z | Продольная и нормальная сила сопротивления на CG транспортного средства |
| Fsx,F, Fsx,R | Продольная сила приостановки на передних и задних осях |
| Fsz,F, Fsz,R | Нормальная сила приостановки на передних и задних осях |
| Fg,x, Fg,z | Продольная и нормальная гравитационная сила на транспортном средстве вдоль зафиксированной транспортным средством системы координат |
| Md,y | Закрутите должный тормозить транспортное средство о зафиксированной транспортным средством оси Y |
| a, B | Расстояние передних и задних осей, соответственно, от нормальной точки проекции CG транспортного средства на общую плоскость оси |
| h | Высота CG транспортного средства выше плоскости оси вдоль зафиксированной транспортным средством оси z |
| FsF, FsR | Приостановка передней и задней оси обеспечивает вдоль зафиксированной транспортным средством оси z |
| ZwF, ZwR | Переднее и заднее нормальное положение транспортного средства вдоль зафиксированной землей оси z |
| Θ | Угол тангажа транспортного средства о зафиксированной транспортным средством оси Y |
| m | Масса кузова |
| NF, NR | Количество передних и задних колес |
| Iyy | Момент кузова инерции о зафиксированной транспортным средством оси Y |
| x, , | Транспортное средство продольное положение, скорость и ускорение вдоль зафиксированной транспортным средством оси X |
Нормальное положение транспортного средства, скорость и ускорение вдоль зафиксированной транспортным средством оси z | |
| FkF, FkR | Передняя и задняя жесткость приостановки колеса обеспечивает вдоль зафиксированной транспортным средством оси z |
| FbF, FbR | Переднее и заднее затухание приостановки колеса обеспечивает вдоль зафиксированной транспортным средством оси z |
| ZF, ZR | Переднее и заднее вертикальное положение транспортного средства вдоль зафиксированной землей оси Z |
Переднее и заднее транспортное средство вертикальная скорость вдоль зафиксированной транспортным средством оси z | |
Переднее и заднее вертикальное положение оси колеса вдоль зафиксированной транспортным средством оси z | |
Передняя и задняя ось колеса вертикальная скорость вдоль зафиксированной землей оси z | |
| dZF, dZR | Отклонение приостановки передней и задней оси вдоль зафиксированной транспортным средством оси z |
Уровень отклонения приостановки передней и задней оси вдоль зафиксированной транспортным средством оси z | |
| Cd | Лобный коэффициент аэродинамического сопротивления, действующий вдоль зафиксированной транспортным средством оси X |
| Cl | Боковой коэффициент аэродинамического сопротивления, действующий вдоль зафиксированной транспортным средством оси z |
| Cpm | Момент тангажа аэродинамического сопротивления, действуя о зафиксированной транспортным средством оси Y |
| Af | Лобная область |
| Pabs | Экологическое абсолютное давление |
| R | Атмосферная определенная газовая константа |
| T | Экологическая температура воздуха |
| wx | Скорость ветра вдоль зафиксированной транспортным средством оси X |
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, усилитель мощности (УМ): ассоциация инженеров автомобилестроения, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, усилитель мощности (УМ): ассоциация инженеров автомобилестроения, 2008.
[3] Технический Комитет. Дорожные транспортные средства — Динамика аппарата и способность устойчивости движения — Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011.
Vehicle Body 1DOF Longitudinal | Vehicle Body Total Road Load
