Можно использовать приложение для маркировки и объекты Computer Vision Toolbox™ и функции, чтобы обучить алгоритмы от достоверных данных. Используйте приложение для маркировки, чтобы интерактивно помечать достоверные данные в видео, последовательности изображений, коллекции изображений или пользовательском источнике данных. Затем используйте маркированные данные, чтобы создать обучающие данные, чтобы обучить детектор объектов или обучить сеть семантической сегментации.
Этот рабочий процесс применяется к Image Labeler и приложениям Video Labeler только. Чтобы создать обучающие данные для приложения Ground Truth Labeler (Automated Driving Toolbox) в Automated Driving Toolbox™, используйте gatherLabelData (Automated Driving Toolbox) функция.
Загрузите данные для маркировки
Image Labeler — Загрузите коллекцию изображений из файла или ImageDatastore объект в приложение.
Video Labeler — Загрузите видео, последовательность изображений или пользовательский источник данных в приложение.
Пометьте данные и выберите алгоритм автоматизации: Создайте ROI и метки сцены в рамках приложения. Для получения дополнительной информации см.:
Image Labeler — Начало работы с Image Labeler
Video Labeler — Начало работы с Video Labeler
Можно выбрать из одного из встроенных алгоритмов или создать собственный алгоритм, чтобы пометить объекты в данных. Чтобы изучить, как создать ваш собственный алгоритм автоматизации, смотрите, Создают Алгоритм Автоматизации для Маркировки.
Метки экспорта: После маркировки ваших данных можно экспортировать метки в рабочую область или сохранить их в файл. Метки экспортируются как groundTruth объект. Если ваш источник данных состоит из наборов повторного изображения, пометьте целый набор коллекций изображений, чтобы получить массив groundTruth объекты. Для получения дополнительной информации о совместном использовании groundTruth объекты, смотрите Долю, и Хранилище Пометило Ground Truth Data.
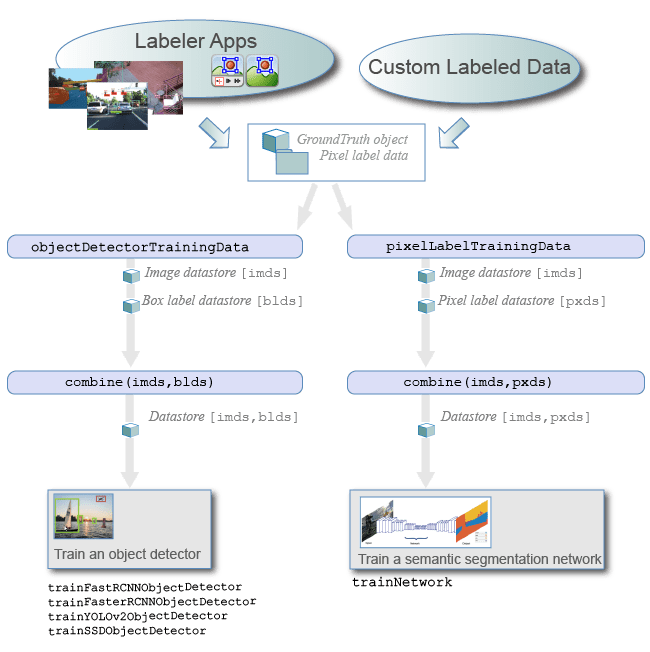
Создайте обучающие данные: создать обучающие данные из groundTruth объект, используйте одну из этих функций:
Обучающие данные для детекторов объектов — Использование objectDetectorTrainingData функция.
Обучающие данные для сетей семантической сегментации — Использование pixelLabelTrainingData функция.
Для объектов, созданных с помощью видеофайла или пользовательского источника данных, objectDetectorTrainingData и pixelLabelTrainingData функции пишут изображения в диск для groundTruth. Произведите достоверные данные путем определения фактора выборки. Выборка смягчает перетренировку детектора объектов на подобных выборках.
Алгоритм Обучения:
Детекторы объектов — Использование один из нескольких детекторов объектов Computer Vision Toolbox. Для списка детекторов смотрите Обнаружение объектов. Для детекторов объектов, характерных для автоматизированного управления, смотрите детекторы объектов Automated Driving Toolbox, перечисленные в Визуальном Восприятии (Automated Driving Toolbox).
Сеть семантической сегментации — для получения дополнительной информации при обучении сети семантической сегментации, смотрите Начало работы с Семантической Сегментацией Используя Глубокое обучение.
semanticseg | objectDetectorTrainingData | trainRCNNObjectDetector | trainRCNNObjectDetector | trainFasterRCNNObjectDetector | trainACFObjectDetector | trainYOLOv2ObjectDetector | trainSSDObjectDetector | pixelLabelTrainingData