Дифференциал как планетарный конический механизм
Powertrain Blockset / Ходовая часть / Финал Управляет Модулем
Vehicle Dynamics Blockset / Трансмиссия / Ходовая часть / Финал Управляет Модулем
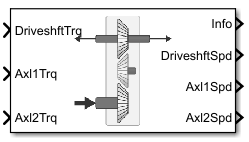
Блок Transfer Case реализует дифференциал как планетарную коническую зубчатую передачу. Блок соответствует, скос карданного вала связывают с короной (кольцевой) конический механизм. Можно задать:
Отношение несущей к карданному валу
Расположение ведомой шестерни
Вязкий и коэффициенты демпфирования для осей и несущей
Используйте блок Transfer Case для:
Динамически свяжите карданный вал постпередачи с осями колеса или универсальными соединениями
Упрощенные или более старые ходовые части модели, когда оптимальное регулирование тягового усилия не требует пассивной или активной векторизации крутящего момента
Механическая энергия модели, разделяющая в типовой коробке передач и сценариях линии диска
Блок подходит для использования в оборудовании в цикле рабочих процессах оптимизации и (HIL). Все параметры являются настраиваемыми.
С учетом КПД блока используйте параметр Efficiency factors. Эта таблица суммирует реализацию блока для каждой установки.
| Установка | Реализация |
|---|---|
| Постоянный КПД, который можно установить параметром Constant efficiency factor, eta. |
| КПД в зависимости от основного входного крутящего момента механизма, температуры воздуха и скорости карданного вала. Используйте эти параметры, чтобы задать интерполяционную таблицу и точки останова:
Для температуры воздуха вы можете также:
Чтобы выбрать метод интерполяции, используйте параметр Interpolation method. Для получения дополнительной информации смотрите Методы интерполяции. |
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Механическая энергия от карданного вала | |
| Механическая энергия от оси 1 | |||
| Механическая энергия от оси 2 | |||
|
|
| Общие потери мощности | ||
| Потери мощности из-за затухания | |||
|
|
| Изменение уровня сохраненной внутренней энергии | ||
Блок Transfer Case реализует эти дифференциальные уравнения, чтобы представлять механический динамический ответ для механизма короны, передней оси и задней оси.
| Механический динамический ответ | Дифференциальное уравнение |
|---|---|
| Коронуйте механизм |
|
| Передняя ось |
|
| Задняя ось |
|
Уравнения используют эти переменные.
| N | Передаточное отношение несущей к карданному валу |
| Jd | Вращательная инерция блока механизма короны |
| bd | Коронуйте механизм линейное вязкое затухание |
| ωd | Карданный вал угловая скорость |
| η | Дифференциальный КПД |
| J1 | Ось 1 вращательная инерция |
| b1 | Ось 1 линейное вязкое затухание |
| ω1 | Ось 1 скорость |
| J2 | Ось 2 вращательной инерции |
| b2 | Ось 2 линейных вязких затухания |
| ω2 | Ось 2 угловых скорости |
| Td | Крутящий момент карданного вала |
| T1 | Ось 1 крутящий момент |
| T2 | Ось 2 крутящих момента |
| Ti | Карданный вал внутренний крутящий момент сопротивления |
| Ti1 | Ось 1 внутренний крутящий момент сопротивления |
| Ti2 | Ось 2 внутренних крутящих момента сопротивления |
