В Control System Toolbox™ PID Tuner предоставляет графики отклика системы и другие инструменты для настройки ПИД-регуляторов для объектов, представленных моделями LTI.
Для получения информации об анализе в PID Tuner с Simulink® модели, смотрите, Анализируют Проект в PID Tuner (Simulink Control Design).
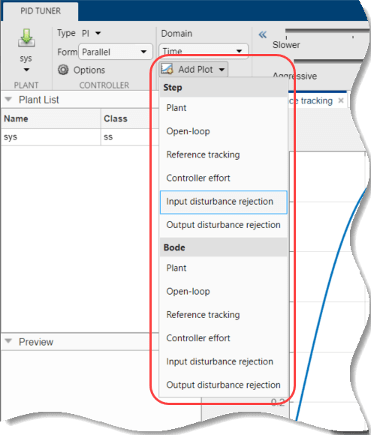
Чтобы определить, удовлетворяет ли проект компенсатора ваши требования, можно анализировать отклик системы с помощью графиков отклика. На вкладке PID Tuner выберите график отклика из меню Add Plot. Меню Add Plot также позволяет вам выбрать из нескольких графиков шага (ответ временного интервала) или Диаграммы Боде (ответ частотного диапазона).
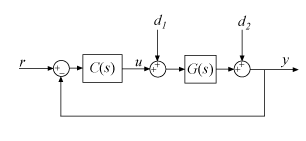
Для типов ПИД-регулятора 1-DOF, таких как PI, PIDF и PDF, программное обеспечение вычисляет отклики системы, основанные на следующей одноконтурной архитектуре управления, где G является вашим заданным объектом, и C является ПИД-регулятором:
Для типов ПИД-регулятора 2-DOF, таких как PI2, PIDF2 и I-PD, программное обеспечение вычисляет ответы, основанные на следующей архитектуре:
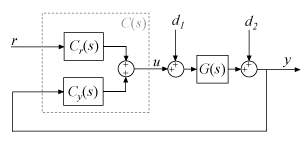
Отклики системы основаны на разложении ПИД-регулятора 2-DOF, C, на компонент заданного значения C r и компонент обратной связи C y, как описано в ПИД-регуляторах с двумя степенями свободы.
Следующая таблица обобщает доступные ответы для графиков для анализа. (Для объектов данных частотной характеристики, таких как frd модели, графики отклика временного интервала не доступны.)
| Ответ | Нанесенная на график система (1-DOF) | Нанесенная на график система (2-DOF) | Описание |
|---|---|---|---|
Plant | G | G | Ответ объекта. Используйте, чтобы исследовать динамику объекта. |
Open-loop | GC | –GCy | Ответ системы объекта контроллера разомкнутого контура. Используйте для проекта частотного диапазона. Используйте, когда ваши технические требования проекта будут включать критерии робастности, такие как поле коэффициента усиления разомкнутого контура и запас по фазе. |
Reference tracking | (от r до y) | (от r до y) | Отклик системы с обратной связью к ступенчатому изменению в заданном значении. Используйте, когда ваши технические требования проекта будут включать отслеживание заданного значения. |
Controller effort | (от r до u) | (от r до u) | Ответ контроллера выход с обратной связью на ступенчатое изменение в заданном значении. Используйте, когда ваш проект будет ограничен практическими ограничениями, такими как насыщение контроллера. |
Input disturbance rejection | (от d 1 к y) | (от d 1 к y) | Отклик системы с обратной связью, чтобы загрузить воздействие (воздействие шага во входе объекта). Используйте, когда ваши технические требования проекта будут включать входное подавление помех. |
Output disturbance rejection | (от d 2 к y) | (от d 2 к y) | Отклик системы с обратной связью к воздействию шага на объекте выводится. Используйте, когда это необходимо, чтобы анализировать чувствительность к моделированию ошибок. |
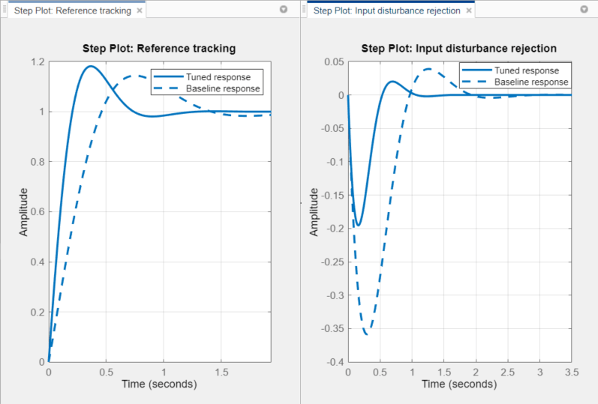
Если вы задали базовый контроллер, то PID Tuner по умолчанию отображает и ответы с помощью текущего проекта PID Tuner и ответы с помощью базового контроллера.
Существует два способа задать базовый контроллер.
Загрузите базовый контроллер, когда вы откроете PID Tuner, с помощью синтаксиса pidTuner(sys,C0).
Заставьте текущий PID Tuner спроектировать базовый контроллер в любое время путем нажатия на стрелу Export![]() и выбора
и выбора Save as Baseline.
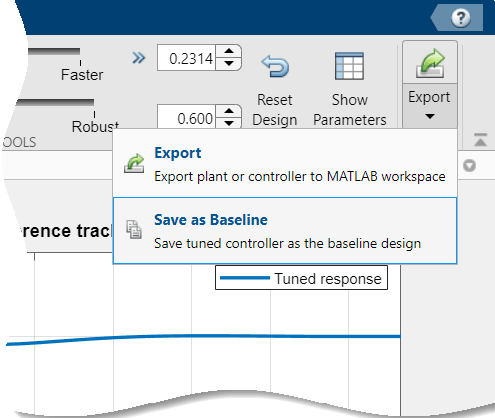
Когда вы делаете так, текущий ответ Tuned становится ответом Baseline. Дальнейшая корректировка текущего проекта создает новую линию ответа Tuned.
Чтобы скрыть ответ Baseline, нажмите![]() Options и очистите Show Baseline Controller Data.
Options и очистите Show Baseline Controller Data.
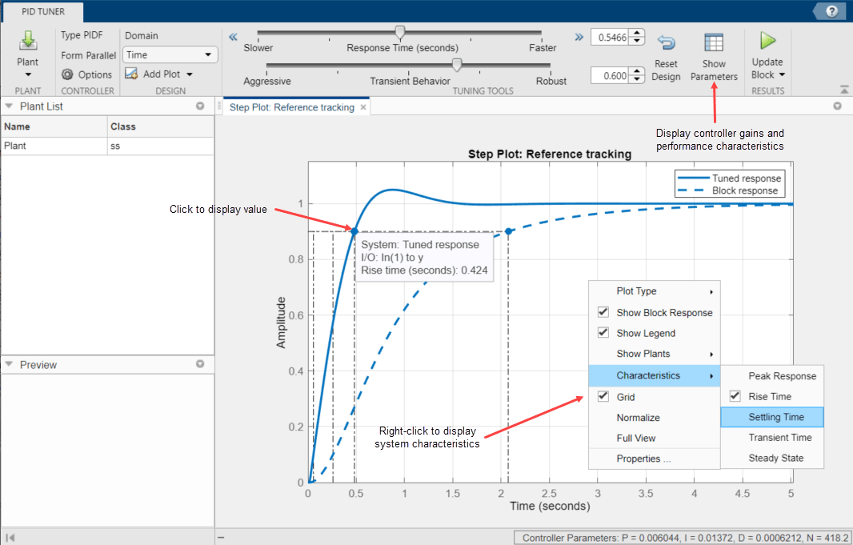
Можно просмотреть значения для характеристик системы, таких как максимальная чувствительность и запас по амплитуде, также:
Непосредственно на графике отклика — Использование контекстное меню, чтобы добавить характеристики, которые появляются как синие маркеры. Затем щелкните левой кнопкой по маркеру, чтобы отобразить соответствующую информационную панель.
В таблице Performance and robustness — Чтобы отобразить эту таблицу, нажмите![]() Show Parameters.
Show Parameters.
Если ответ первоначального проекта контроллера не удовлетворяет ваши требования, можно в интерактивном режиме настроить проект. PID Tuner дает вам две опции Domain для совершенствования проектирования контроллера:
Time область (значение по умолчанию) — Использование ползунок Response Time, чтобы сделать ответ с обратной связью системы управления быстрее или медленнее. Используйте ползунок Transient Behavior, чтобы сделать контроллер более агрессивным в подавлении помех или более устойчивым против неопределенности объекта.
Frequency — Используйте ползунок Bandwidth, чтобы сделать ответ с обратной связью системы управления быстрее, или медленнее (время отклика является 2/wc, где wc является полосой пропускания). Используйте ползунок Phase Margin, чтобы сделать контроллер более агрессивным в подавлении помех или более устойчивым против неопределенности объекта.
В обоих режимах существует компромисс между эффективностью подавления помех и отслеживанием уставки. Для примера, который показывает, как использовать ползунки, чтобы настроить этот компромисс, смотрите ПИД-регулятор Мелодии, чтобы Способствовать Отслеживанию уставки или Подавлению помех (PID Tuner).
Совет
Чтобы вернуться к первоначальному проекту контроллера после перемещения ползунков, нажмите![]() Reset Design.
Reset Design.
