Ограничьте динамику системы с обратной связью, заданной обратной связи или заданных настроек разомкнутого контура, при использовании Control System Tuner.
Цель полюсов ограничивает динамику вашей целой системы управления или заданной обратной связи вашей системы управления. Ограничение динамики обратной связи означает ограничивать динамику функции чувствительности, измеренной в заданном местоположении в системе управления.
Используя Цель полюсов, можно задать конечный минимальный уровень затухания или минимальное затухание для полюсов в системе управления или заданном цикле. Можно задать максимальную собственную частоту для этих полюсов, чтобы устранить быструю динамику в настроенной системе управления.
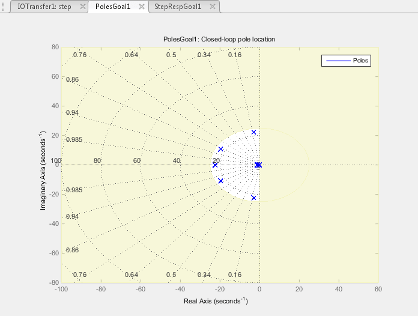
В Control System Tuner заштрихованная область на графике представляет область в частотном диапазоне, где ограничениям местоположения полюса не соответствуют.
Чтобы ограничить динамику или гарантировать устойчивость одного настраиваемого компонента системы управления, используйте Цель полюсов Контроллера.
Во вкладке Tuning Control System Tuner выберите New Goal> Constraint on closed-loop dynamics, чтобы создать Цель полюсов.
При настройке систем управления в командной строке используйте TuningGoal.Poles задавать цель подавления помех.
Используйте этот раздел диалогового окна, чтобы задать фрагмент системы управления, для которой вы хотите ограничить динамику. Можно также задать открывающие цикл местоположения для оценки настраивающейся цели.
Entire system
Выберите эту опцию, чтобы ограничить местоположения полюсов с обратной связью системы управления.
Specific feedback loop(s)
Выберите эту опцию, чтобы задать одну или несколько обратной связи, чтобы ограничить. Задайте обратную связь путем выбора местоположения сигнала в системе управления. Цель полюсов ограничивает динамику функции чувствительности, измеренной в том местоположении. (См. getSensitivity (Simulink Control Design) для получения информации о функциях чувствительности.)
Чтобы ограничить динамику цикла SISO, выберите однозначное местоположение. Например, чтобы ограничить динамику функции чувствительности, измеренной в местоположении под названием 'y', нажмите ![]() Add signal to list и выберите
Add signal to list и выберите 'y'. Чтобы ограничить динамику цикла MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Compute poles with the following loops open
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно открыть обратную связь в целях оценки этой настраивающей цели. Настраивающаяся цель оценена против настройки разомкнутого контура, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Например, чтобы оценить настраивающуюся цель с открытием в местоположении под названием 'x', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'x'.
Совет
Подсвечивать любой выбранный сигнал в Simulink® модель, щелкнуть![]() . Чтобы удалить сигнал из списка вводов или выводов, щелкнуть
. Чтобы удалить сигнал из списка вводов или выводов, щелкнуть![]() . Когда вы выбрали несколько сигналов, можно переупорядочить их использование
. Когда вы выбрали несколько сигналов, можно переупорядочить их использование![]() и
и![]() . Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
. Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
Используйте этот раздел диалогового окна, чтобы задать пределы на местоположениях полюса.
Minimum decay rate
Введите целевой минимальный уровень затухания для системных полюсов. Системные полюса с обратной связью, которые зависят от настраиваемых параметров, ограничиваются удовлетворить Re(s) < -MinDecay для систем непрерывного времени или log(|z|) < -MinDecay*Ts для систем дискретного времени с шагом расчета Ts. Это ограничение помогает гарантировать устойчивую динамику в настроенной системе.
Войдите 0, чтобы не наложить ограничение на уровень затухания.
Minimum damping
Введите целевое минимальное затухание полюсов с обратной связью настроенной системы как значение между 0 и 1. Системные полюса с обратной связью, которые зависят от настраиваемых параметров, ограничиваются удовлетворить Re(s) < -MinDamping*|s|. В дискретное время коэффициент затухания вычисляется с помощью s = log(z)/Ts.
Войдите 0, чтобы не наложить ограничение на коэффициент затухания.
Maximum natural frequency
Введите целевую максимальную собственную частоту полюсов настроенной системы в модулях модели системы управления, которую вы настраиваете. Когда вы настраиваете систему управления с помощью этого требования, системные полюса с обратной связью, которые зависят от настраиваемых параметров, ограничиваются удовлетворить |s| < MaxFrequency для систем непрерывного времени или |log(z)| < MaxFrequency*Ts для систем дискретного времени с шагом расчета Ts. Это ограничение предотвращает быструю динамику в системе управления.
Введите Inf не наложить ограничение на собственную частоту.
Используйте этот раздел диалогового окна, чтобы задать дополнительные характеристики цели полюсов.
Enforce goal in frequency range
Ограничьте осуществление настраивающейся цели к конкретному диапазону частот. Задайте диапазон частот как вектор-строку из формы [min,max], описанный в единицах частоты вашей модели. Например, чтобы создать настраивающуюся цель, которая применяется только между 1 и 100 рад/с, введите [1,100]. По умолчанию настраивающаяся цель применяется на всех частотах в течение непрерывного времени, и до частоты Найквиста в течение дискретного времени.
Цель полюсов применяется только к полюсам с собственной частотой в диапазоне, который вы указываете.
Apply goal to
Используйте эту опцию при настройке многоуровневых моделей целиком, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные настраивающие цели осуществляются для всех моделей. Чтобы осуществить настраивающееся требование для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых осуществляется цель. Например, предположите, что вы хотите применить настраивающуюся цель к вторым, третьим, и четвертым моделям в массиве моделей. Чтобы ограничить осуществление требования, введите 2:4 в текстовом поле Only Models.
Для получения дополнительной информации о настройке для многоуровневых моделей, смотрите Устойчивые Настраивающие Подходы (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую настраивающую цель в нормированное скалярное значение f (x). Здесь, x является вектором из свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для Poles Goal f (x) отражает относительную удовлетворенность или нарушение цели. Например, если ваша Цель полюсов ограничивает полюса с обратной связью обратной связи к минимальному затуханию ζ = 0.5, то:
f (x) = 1 среднее значение самое маленькое затухание среди ограниченных полюсов является ζ = 0.5 точно.
f (x) = 1,1 средних значения самое маленькое затухание ζ = 0.5/1.1 = 0.45, примерно на 10% меньше, чем цель.
f (x) = 0,9 средних значения самое маленькое затухание ζ = 0.5/0.9 = 0.55, примерно на 10% лучше, чем цель.
