Automated Driving Toolbox™ использует эти системы координат:
Мир: фиксированная универсальная система координат, в которую помещаются все транспортные средства и их датчики.
Транспортное средство: Привязанный на автомобиле, оборудованном датчиком. Как правило, система координат транспортного средства помещается в землю прямо ниже средней точки задней оси.
Датчик: Характерный для конкретного датчика, такого как камера или радар.
Пространственный: Характерный для изображения получен камерой. Местоположения в пространственных координатах описываются в модулях пикселей.
Шаблон: система координат шаблона шахматной доски, обычно используемая, чтобы калибровать датчики камеры.
Эти системы координат применяются через функциональность Automated Driving Toolbox от восприятия, чтобы управлять к ведущей симуляции сценария. Для получения информации о конкретных различиях и деталях реализации в 3D среде симуляции с помощью Нереального Engine® от эпических игр®, смотрите Системы координат для Нереальной Симуляции Engine в Automated Driving Toolbox.
Все транспортные средства, датчики и их связанные системы координат помещаются в систему мировой координаты. Система мировой координаты важна в глобальном планировании пути, локализации, отображении и ведущей симуляции сценария. Automated Driving Toolbox использует предназначенную для правой руки Декартову систему мировой координаты, заданную в ISO 8855, где Z - ось подчеркивает от земли. Величины в метрах.
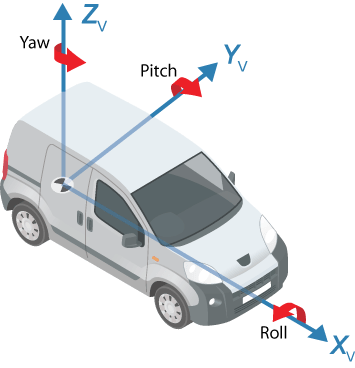
Система координат транспортного средства (X V, Y V, Z V) используемый Automated Driving Toolbox привязывается на автомобиле, оборудованном датчиком. Термин ego vehicle относится к транспортному средству, которое содержит датчики, которые чувствуют среду вокруг транспортного средства.
X V точек оси передает от транспортного средства.
Y V точек оси налево, как просматривается при направлении вперед.
Z V осей подчеркивает от земли, чтобы обеспечить правую систему координат.
Система координат транспортного средства следует соглашению ISO 8855 для вращения. Каждая ось положительна в направлении по часовой стрелке при взгляде в положительном направлении той оси.
В большей части функциональности Automated Driving Toolbox, такой как кубоид ведущие симуляции сценария и визуальные алгоритмы восприятия, источник системы координат транспортного средства находится на земле ниже средней точки задней оси. В 3D ведущих симуляциях сценария источник находится на земле ниже продольного и бокового центра транспортного средства. Для получения дополнительной информации смотрите Системы координат для Нереальной Симуляции Engine в Automated Driving Toolbox.
Местоположения в системе координат транспортного средства описываются в мировых единицах измерения, обычно метры.
Значения, возвращенные отдельными датчиками, преобразовываются в систему координат транспортного средства так, чтобы они могли быть размещены в объединенную систему отсчета.
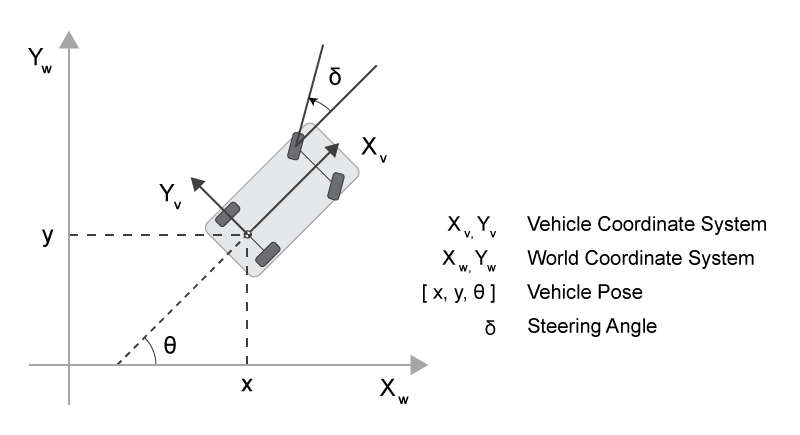
Для глобального планирования пути, локализации, отображения и ведущей симуляции сценария, состояние транспортного средства может быть описано с помощью положения транспортного средства. Держащийся угол транспортного средства положителен в направлении против часовой стрелки.
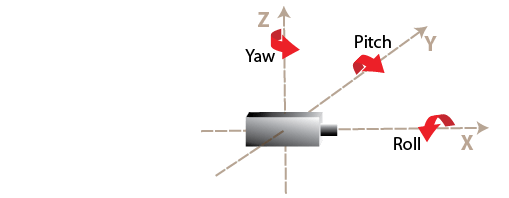
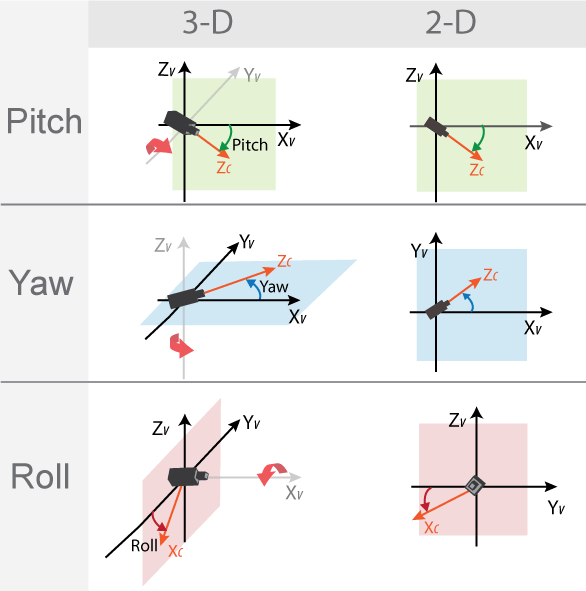
Автоматизированная система вождения может содержать датчики, расположенные где угодно на или в транспортном средстве. Местоположение каждого датчика содержит источник своей системы координат. Камера является одним типом датчика, используемого часто в автоматизированной системе вождения. Точки, представленные в системе координат камеры, описаны с источником, расположенным в оптическом центре камеры.
Рыскание, тангаж и крен датчиков следуют соглашению ISO. Эти углы имеют положительные направления по часовой стрелке при взгляде в положительном направлении Z - Y - и X - оси, соответственно.
Пространственные координаты позволяют вам задать местоположение в изображении с большей гранулярностью, чем пиксельные координаты. В пиксельной системе координат пиксель обработан как дискретный модуль, однозначно определенный целочисленной парой строки и столбца, такой как (3,4). В системе пространственной координаты местоположения в изображении представлены в терминах частичных пикселей, такой как (3.3,4.7).
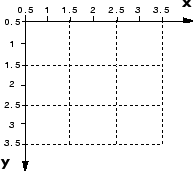
Для получения дополнительной информации о системе пространственной координаты смотрите Пространственные координаты.
Чтобы оценить параметры монокулярного датчика камеры, общий метод должен калибровать камеру с помощью повторных изображений калибровочного шаблона, таких как шахматная доска. В системе координат шаблона, (X P, Y P), P-ось X указывает направо и точки P-оси Y вниз. Источник шахматной доски является нижним правым углом верхнего левого квадрата шахматной доски.
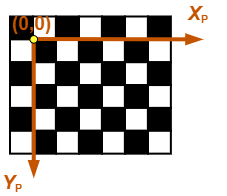
Каждый угол шахматной доски представляет другую точку в системе координат. Например, угол справа от источника (1,0), и угол ниже источника (0,1). Для получения дополнительной информации о калибровке камеры при помощи шаблона шахматной доски смотрите, Калибруют Монокулярную Камеру.
