Компенсируйте CIC-фильтр с помощью КИХ-интерполятора
Фильтрация/Фильтр Проектов
dspfdesign
Блок CIC Compensation Interpolator использует КИХ многофазный интерполятор в качестве фильтра компенсации. Интерполяторы компенсации CIC являются многоскоростными КИХ-фильтрами, которые могут быть расположены каскадом с интерполяторами CIC, чтобы смягчить недостатки CIC-фильтров.
Фильтры интерполяции CIC используются в областях, которые требуют высокой интерполяции. Эти фильтры популярны в ASICs и FPGAs, поскольку у них нет множителей. CIC-фильтры имеют два недостатка:
CIC-фильтры имеют ответ величины, который вызывает свисание в области полосы пропускания. Этот ответ величины:
M Дифференциальная задержка
n Количество этапов
ω — Нормированная угловая частота
CIC-фильтры имеют широкую область перехода.
Фильтры интерполятора компенсации имеют инверсию sinc ответ полосы пропускания, чтобы откорректировать для свисания CIC, и у них есть узкая ширина перехода.
Этот блок приносит возможности dsp.CICCompensationInterpolator Система object™ к Simulink® среда.
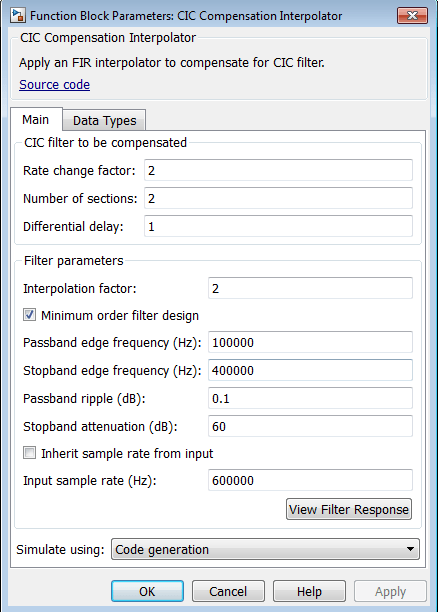
Фактор изменения уровня для CIC-фильтра, который будет компенсирован в виде положительного скалярного целого числа. Значением по умолчанию является 2.
Количество интегратора и разделы расчески CIC-фильтра, который будет компенсирован в виде положительного скалярного целого числа. Значением по умолчанию является 2.
Задержите значение, используемое в каждом из разделов расчески CIC-фильтра, который будет компенсирован в виде положительного скалярного целого числа. Значением по умолчанию является 1.
Коэффициент интерполяции компенсатора в виде положительного скалярного целого числа. Значением по умолчанию является 2.
Когда вы устанавливаете этот флажок, фильтры блочных конструкций с минимальным порядком, который выполняет техническим требованиям для частоты полосы пропускания, частоты полосы задерживания, неравномерности в полосе пропускания и затухания в полосе задерживания. Когда вы снимаете этот флажок, фильтры блочных конструкций с порядком, который вы задаете в Filter order.
По умолчанию этот флажок устанавливается.
Порядок компенсации фильтрует в виде положительного скалярного целого числа. Значением по умолчанию является 12.
Частота ребра полосы пропускания компенсации фильтрует в виде действительной положительной скалярной величины в Гц. Passband edge frequency (Hz) должен быть меньше Fs/2, где Fs является выходной частотой дискретизации. Значением по умолчанию является 100000.
Частота ребра полосы задерживания компенсации фильтрует в виде действительной положительной скалярной величины в герц. Stopband edge frequency (Hz) должен быть меньше Fs/2, где Fs является выходной частотой дискретизации. Значением по умолчанию является 400000.
Неравномерность в полосе пропускания компенсации фильтрует в виде действительной положительной скалярной величины в дБ. Значением по умолчанию является 0.1.
Затухание в полосе задерживания компенсации фильтрует в виде действительной положительной скалярной величины в дБ. Значением по умолчанию является 60.
Когда вы устанавливаете этот флажок, блок наследовал свою частоту дискретизации от входного сигнала. Когда вы снимаете этот флажок, необходимо задать частоту дискретизации в Input sample rate (Hz).
Введите частоту дискретизации в виде скаляра в Гц. Значением по умолчанию является 600000.
Открывает Инструмент Визуализации Фильтра FVTool и отображает величину/фазовый отклик CIC Compensation Interpolator. Ответ основан на параметрах диалогового окна блока. Изменения, внесенные в эти параметры, обновляют FVTool.
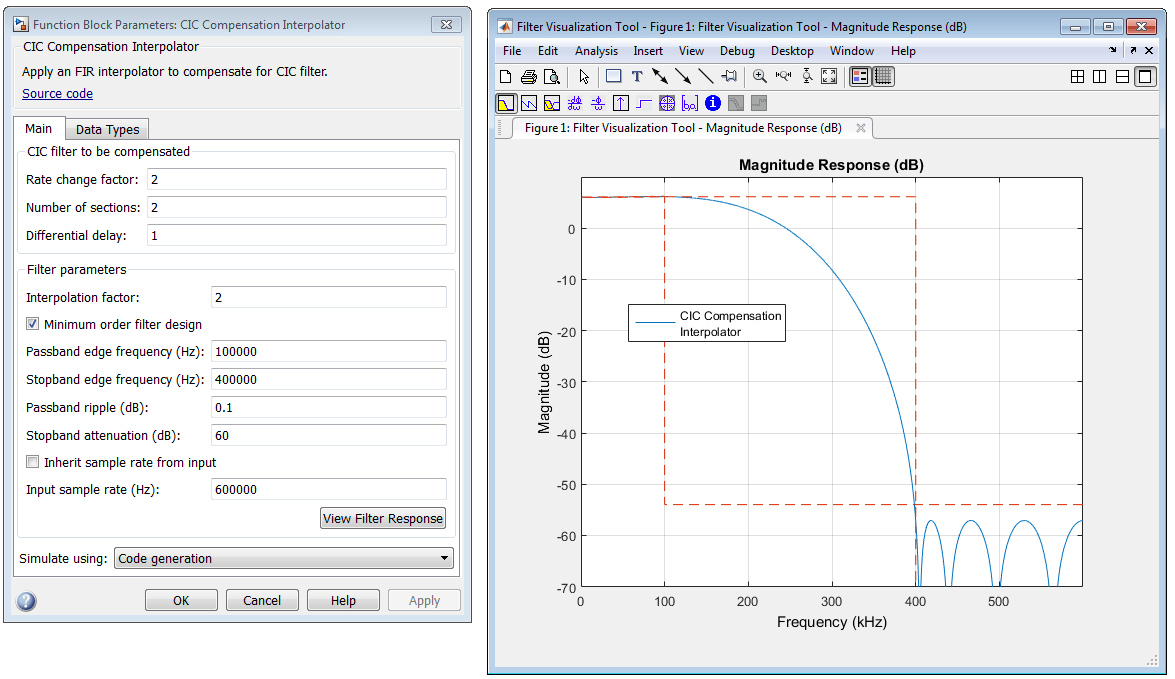
Чтобы обновить ответ величины, в то время как FVTool запускается, измените параметры диалогового окна и нажмите Apply.
Тип симуляции, чтобы запуститься. Можно установить этот параметр на:
Code generation (значение по умолчанию)
Симулируйте модель с помощью сгенерированного кода C. В первый раз, когда вы запускаете симуляцию, Simulink генерирует код С для блока. Код С снова используется для последующих симуляций, пока модель не изменяется. Эта опция требует дополнительного времени запуска, но обеспечивает более быструю скорость симуляции, чем Interpreted execution.
Interpreted execution
Симулируйте модель с помощью MATLAB® интерпретатор. Эта опция сокращает время запуска, но имеет более медленную скорость симуляции, чем Code generation.
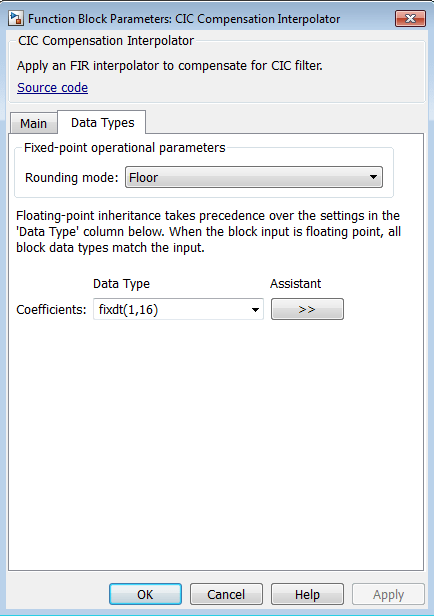
Округление метода для выходных операций фиксированной точки. Методами округления является Ceiling, Convergentполсамый близкийвокруг, Simplest, и Zero. Значением по умолчанию является Floor.
Тип данных с фиксированной точкой коэффициентов в виде одного из следующего:
fixdt(1,16) (значение по умолчанию) — Тип данных с фиксированной точкой со знаком размера слова 16, с масштабированием двоичной точки. Блок определяет дробную длину автоматически из содействующих значений таким способом, которым коэффициенты занимают максимальную представимую область значений без переполнения.
fixdt(1,16,0) — Тип данных с фиксированной точкой со знаком размера слова 16, дробная длина 0. Можно изменить дробную длину в любое другое целочисленное значение.
<data type expression> — Задайте содействующий тип данных при помощи выражения, которое оценивает к объекту типа данных, например, числовой тип (fixdt([ ],16, 15), чтобы задать содействующий тип данных. Задайте режим знака этого типа данных как [ ] или верный.
Refresh Data Type — Обновления к типу данных по умолчанию.
Нажмите кнопку Show data type assistant![]() , чтобы отобразить ассистент типа данных, который помогает вам установить входной параметр этапа.
, чтобы отобразить ассистент типа данных, который помогает вам установить входной параметр этапа.
Смотрите Задают Типы данных Используя Ассистент Типа данных (Simulink) для получения дополнительной информации.
| Порт | Поддерживаемые типы данных |
|---|---|
Входной параметр |
|
Вывод |
|
dsp.CICCompensationInterpolator | DSP System Toolbox |
| CIC Compensation Decimator | DSP System Toolbox |
Ответом CIC-фильтра дают:
R, D и N являются фактором изменения уровня, дифференциальной задержкой и количеством разделов CIC-фильтра, соответственно.
После децимации cic ответ имеет form:okay
Нормированная версия этого последнего ответа является той, которую должен компенсировать компенсатор CIC. Следовательно, ответ полосы пропускания компенсатора CIC должен принять следующую форму:
где ω p является частотой полосы пропускания фильтра компенсации CIC.
Заметьте, что, когда ω/2R ≪ π, предыдущее уравнение для Hciccomp (ω) может быть упрощено с помощью факта, которые sin (x) ≅ x:
Это предыдущее уравнение является инверсией sinc приближение к истинному обратному ответу полосы пропускания CIC-фильтра.
